quite unsatisfied by my last program on stars point, i have then done an another one with more accuracy. it includes a display menu with several stars, classified in constellation files. to write it i have used an astrophysics master file findable on the net (http://userpages.irap.omp.eu/jleborgne/astrometrie.pdf), but then i have considered all the corrections (precession, nutation, Bradley's aberration, parallax, refraction, skyline depression). to add a display menu i have used data on a webpage : https://openclassrooms.com/courses/creation-de-barres-de-menus-sur-ti89-92-et-v200.
If you want to add stars or constellations into the menu it's easy you just have to follow this useful tuto. to check if it works i have found a pdf which is called « exercices astro 2016-navigation astronomique ». it works for the exercice but it will be needful to test it in real one or two times in good conditions.
Here you have it, i guess and hope i have not let to much mistakes and bullshits when i have copied it (i have read it several times so it could be ok !) :
If it's not working well, don't hesitate to let me a little message!
PS:a website visitor has noticed two mistakes in the program above:
– local hour angle (variable ahl) : mod(tslo+xxx-lone,360)
– tslo (variable tslo) : gg / 36525 must be replaced by ((gg-h/24-m/1440-s/86400)-2451545)/36525
Relative to the stars, it's still more interesting to calculate position with the sun; during the day the most of time the skyline is clear and easier findable, making sextant's use easier and more accurate, with a wider range of practices's time . As the program does with the stars, we will first search to “transform” all data of our time measurement (hours, minutes, seconds, month, years) in one lonely number. this last one will help us to unroll calculations reminder which is no more than functions woking with time. For this beginning we could have used the same as the stars program, but just for fun, This time we will take account of the Gregorian calendar, and get rid of julian calendar!
1) First part: how to calculate time by using gregorian calendar
Recall: in julian calendar the average year lasts 365.25 days, so a leap year comes each 4 years (2008, 2012, 2016, 2020…). on the calendar it means that we add up a day at the end of february each 4 years (29 days instead of 28).
Summary, on the way to have a calendar year period close to reality, in fact a tropic year period (nearly 365,2422 days), the calculations method has been improved to reduce slowly in time the julian calendar size. With the gregorian calendar an average year lasts 365,2425 days. to reach that point, we keep the julian's calendar features , but each secular year we consider it as a bissextile year only if it could be divided by 400. for our programmation we will then consider a year as bissextile if it is 4 years after an another bissextile's year. Then for secular's years which could be divided by 100 we select and we will accept them as bissextile if they are dividable too by 400. for exemple according to gregorian's calendar 2000 and 2400 are bissextile, but 2500 and 2600 are not bissextile.
here you will find the beginning:
we use the loop “while” and "int" function(). Loop “while” asks to the program to calculate something until it reaches one or several conditions, and function “int()” ne garde que la partie entière d’un nombre, for exemple int(2.7)=2. The number at the end of the page 2457388.5 is the julian's day 01/01/2016 at 00:00.
2) second part: how to calculate with time declination and hour angle 's sun.
As we have seen in “programming a TI89 for navigation”, there are many ways to calculate those parameters, more or less accurate on a short or long period, with more or less difficulties…to have accuracy in results on a very long period, it needs a lot of parameters to consider, and in addition planets have a chaotic behavior on wide periods of time…we will then go ahead all this and keep just all we need for hour needs, a program usefull and relevant for a life period and enough accurate to make a point in navigation and not too bothering to write!
a) hour angle:
if we consider things on the easiest side, we follow the fact that earth is spinning in 24 hours, giving illusion of sun's motion around earth moving at 360°/24H=15°per hour, with sun's passage at greenwich's meridian at 12H UTC. By keeping this writting AHG=15*(l*24) would be enough to calculate greenwich hour angle(AHG), with a greenwich's meridian noon as origin data for time. to find our local hour angle (AHL), only substract our dead longitude from AHG would be enough(G).
however it's inadequate, with this simple method at the end we find high gaps more and more 3 wide regards to the truth! in fact apparent sun's motion regards to earth has not a steadily speed because of the elliptic shape of the earth's way (remember the first and second Kepler's laws), and because of the rotation's earth axis inclined too. Fortunately, Gaps reiterates almost the same years by years, allowing quite easily to calculate good results each time. For this we will work with the time's equation. as our friend wikibobby says this equation matches for a precised time difference between average solar time and true solar time. the average solar time is calculation written in the paragraph just above (sun is moving with a constant velocity) and the true solar time will be calculated with those equations given by wikibobby (take care of earth elliptic's way and earth obliquity). Now in adequation with our program's beginning it gives us this:
The mod function() here is used to get a result always being between 0 and 360 degrees (This function provides the euclidian division's remainder depending on dividend and divider choosen), otherwise we would end up with huge angles without meaning. We could also use the loop “for” but for that the calculator would take more time to calculate. There is 180 after mod() because the program begins at midnight 1/1/2016 (see prog's first part), so this time the average hour angle of the sun with greenwich is 180 degrees (if the prog would have begun at noon, we wouldn't have added up 180 but nothing instead).
For the equations of time, coefficients used are easily noteworthy:
357.5291= average anomaly 01/01/2000 to 12h.
0.98560028= it's the angular's velocity of the average's rotation of earth around the sun between the passage of 2 perihelias, so it's 360 divided by the anomalistic year.
2451545= it's the julian's day of 01/01/2000 to 12h.
1.9148; 0.02; 0.0003it's only a coefficent 's change of the center's equation in degrees(we just have to multiply the first coefficients by 180/π). wiki explains how to get the center's equation.
280.4665= it's the ecliptic's longitude value the 01/01/2000 to 12h.
0.98564736= it's the average angular's velocity about earth around the sun on a tropic year, So we find this value by calculating 360/365.2421898.
-2.46569; 0.053; 0.0014= as the center's equation it's a switch from the first coefficients to coefficients in degrees.
b) declination angle
As we have seen in “programming a TI89 for navigation”, there is a lot of several ways to get sun declination; by using methods with less or more parameters, thus less or more accuracy and less or more difficulties to program it too… not easy. So we will remove "useless" data for our case. we will not take care about planets and moon leverage in our calculations, but Kepler's laws used on the earth/sun system only, it will be not bad at all to begin.
the easiest formula to have declination is the formula which have a simple periodic function's framework (sinus, cosinus) like Desmond Fletcher's equation:
D=23.45*sin(2π/365(284+j)) avec j jours juliens. Here 23.45 answers to the sinus function range, thus to the highest value reachable by declination (during solstices). 2π/365 matches to the sinus function's period, here it will repeat itself every 365 days. 284 is a function's shift. this formula doesn't have in charge the earth ellipticity's trajectory and consider its motion as a cercle's shape. the easiest method but really inaccurate.
for declination an another way to do would be to write a periodic function but by parts, each part matches for a season, thus a function with 4 parts (see “programming a TI89 for navigation”). it works well, easy to do because all we have to know is solstices and equinoxes dates for the following year, however its weakness is that it works just for one year. in fact from a year to an another equinoxes and solstices hours change by following an average value, but the truth is that there are gaps with ranges of few minutes, and at the end this differences cumulation brings…highest differences!
on internet it's easy to find formulas for declination given by IMCCE, efficient for a long or short period. we could also deduce it from the time's equation because we know that:
Why ? because , to prove it it's almost like method used for the rectangular and spheric triangle (allow us to find formulas for azimut and calculated height for a star, planet...), as i am lazy and it's very well explained on the following website page : https://sites.google.com/site/astronomievouteceleste/4—mouvement-du-soleil
from all this we could deduce declination's formula to write after our program's beginning:
So for declination, 3 programmation lines are enough when we know AHG. before going ahead we will check efficiency thanks to the IMCCE website, just to notice if it's accurate enough.
Test
by taking 10 several values we get that:
the 15/12/2019 at 2:22 p.m. : -23°16’13.91”/36°44’27.88”→-23°16'/17h31
the 2/11/2043 2h : -14°40’9.90”/214°6’50.43”→-14°40'/14h29
the 28/2/2055 at 4:47 p.m.: -7°47’20”/68°38’28.54”→-7°47'/22h46
the 12/5/2128 at 5h06: 18°28’20.7”/257°22’25.4”→18°13'/3h18
the 7/07/2184 at 21h12: 22°17’33.11”/136°34’51.76”→22°23'/7h12
the 18/10/2079 23h10: -9°56’58.8”/171°15’1.75”→-9°57/13h35
the 13/6/2046 at 12h11: 23°14’12.71”/2°42’14.74”→23°14'/5h28
the 6/09/2033 at 18h55: 6°6’8.13”/104°12’36.45”→6°6'/11h03
the 1/03/2085 at 4h22: -7°19’47.17”/242°27’31.56”→-7°20'/22h51
the 19/02/2074 at 3h18: -11°10’21.23”/226°4’8.9”→-11°10'/22h12
on the left it's our prog results for declination and greenwich hour angle, and on the right it's the IMCCE website's results “calcul des éphémérides” they give them in declination and right ascension. not to bad it seems, we begin to lose accuracy after 2080 on declination so we have time… we know that right ascension is the angle between vernal point's meridian and a planet's one, measured from east and written in hours, and it's the 360 degrees complement of verse ascension. but we have already found a formula able to calculate vernal point's meridian in our prog to get our position with stars :
100+5.5/60+(l-2451545-5843.5)*(360/365.2421898+360)-0.0524*16/(24*3600*36525)-0.0524*(l-2451545-5843.5)/(24*3600*36525)=vernal point's angle. thus by putting it after in our prog it gets that:
when we compare it with right ascensions given by IMCCE it's not too bad. we could say that until 2080 roughly it's accurate, and after it's decreasing in accuracy. we could consider that our ephemeris part is OK for navigation. we will be able to challenge the next step that's cool. for this part we could have been more meticulous by integrate some stable parameters used like variables like excentricity, duration of tropic and anomalistic year, and inclination angle's earth on ecliptic. however for our needs it will be enough i guess.
3) intercept and true azimut calculations
now we have declination and AHL calculated at watch time, the next level will be to define the calculated height (trigo formula like stars), true height (it's the instrumental height with corrections), and thus intercept and the true sun's azimut.
corrections to add up with instrumental height:
– Refraction of light (depends on the height above the horizon line).
– parallax (depends on the radius of earth, earth/sun distance and height above the horizon's line).
– sun's half diameter (roughly 16 minutes).
– eye's watcher height above the sea's level.
– collimation.
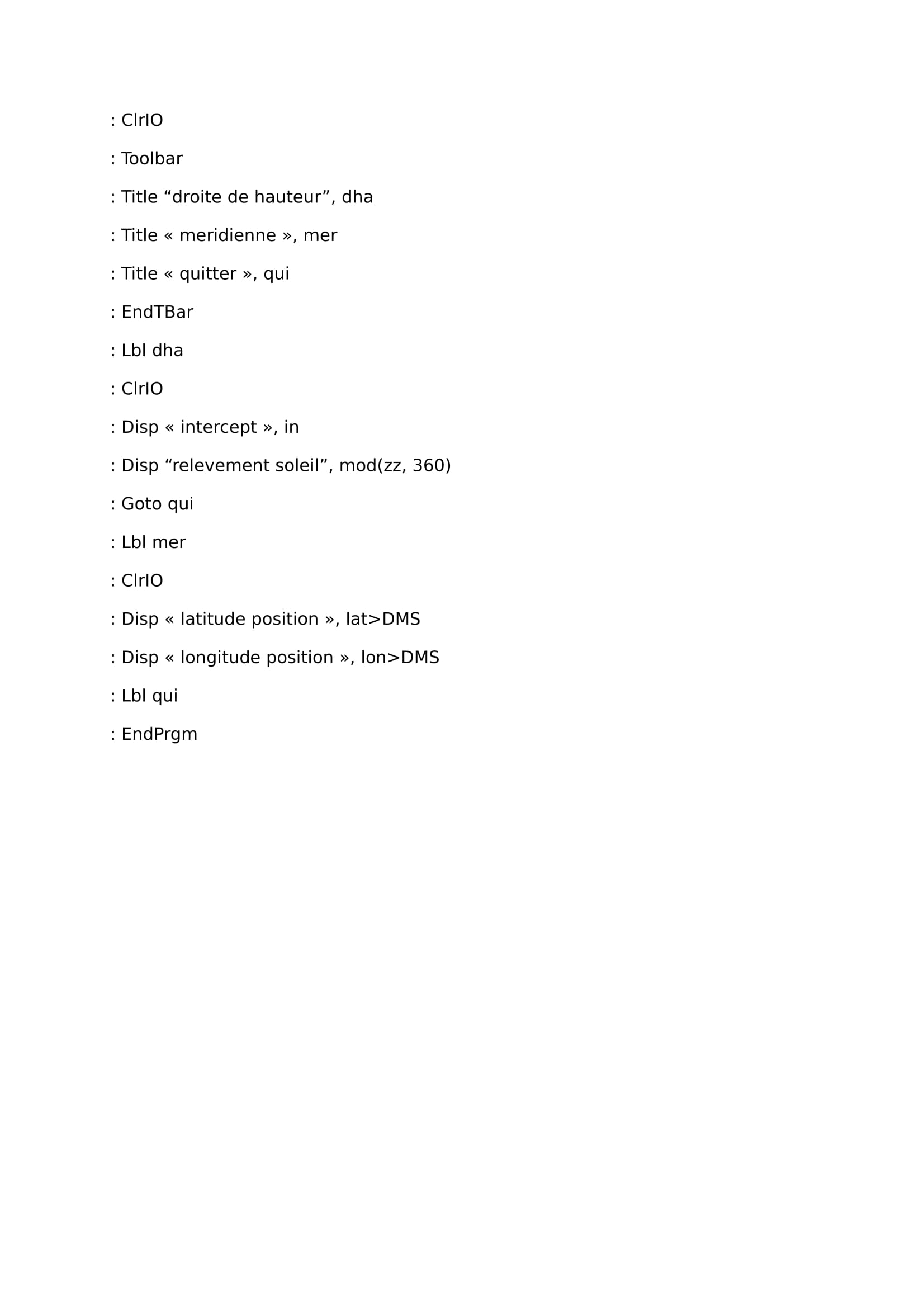
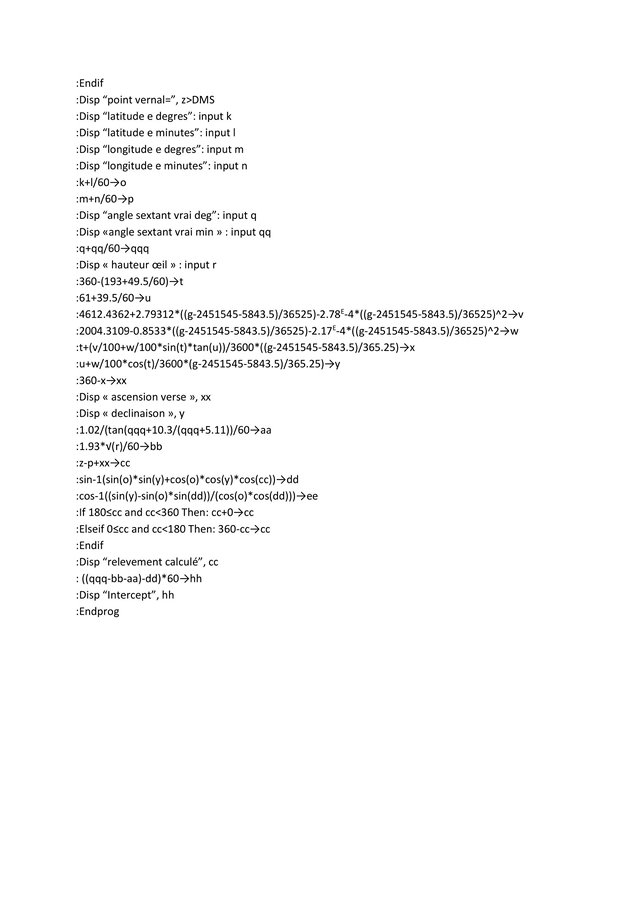
our program draft gives this:
this program allows to calculate meridians too, you just have to push 1 or 2 if you are back to the south or north when you are focusing the Sun.
Attenzione: test !
i have checked the device with navastro's webpages (“navastro.free.fr/meridienne.htm” to do a meridian and “navastro.free.fr/exos/exercices.htm” for straight heights). results are not totally the same but it remains "not bullshit" enough. A little disappointed, I dig it and notices an error in the program above; at the AHL calculation line (ahl) instead of having:
: mod(qq-rrr, 360)→ ahl in fact it's :mod(qq+rrr,360)→ahl
And for intercept instead of having:
: hv-hc→in in fact it's (hv-hc)*60→in
The final program that works is that:
By making these changes, this time we find almost the same results compared with navastro! well, lets Haddock's captain concludes with philosophy…
Stars point is working a little like a navigation point made with three landmarks, but in that case bearings are changed by position lines coming from stars. To have an accurate stars point it's needfull to choose stars the most rejected (the best way is with 120 degrees between each star), and do sextant's watch a little before or after the sun's falling to be able to still notice horizon line. It's important to avoid a choice on stars to close to the horizon too because of light refraction (see Snell's law). It's difficult when you are using sextant to”go down the star on horizon's line” (It's easy to confound a star with an another close to its), That's why it's easier to use sextant with head upside down (scale above), On few words “rise horyzon's line on the choosen star” choosen. The most of time it's only possible to use stars close to horyzon's point where the sun disapears, Beyond this it's hard to see clearly horyzon's line to read an accurate angle.
To write this little program i have often used an astrometry master (introduction aux coordonnées célestes, astrométrie, Jleborgne) from Toulouse university, easy to find on the web, and others things grabbed on the lane.
It's working with equatorial coordinates; we will locate stars with their positions against celestial equator which is finally just equator projection on celestial's sphere. In fact it's almost the same method than how to place something on earth; to locate a star we will have:
–Right ascension the most of time symbolysed by alpha letter, it's the angle read on celestial equator between vernal point and the perpendicular line with celestial equator cuting the watched object. the original point is vernal point and the angle is read from west to east, This angle is the most of time written in hours but is easily convertible in degrees (1 hour=15 degrees, 1 degree=60 minutes, 1 minute=60 secondes), in hours it's changing from 0 to 24 hours (or 0 to 360 degrees ).
– declination angle often symbolized by delta letter, angle read between the object seen and celestial equator. It can rise until 90 degrees (-90 at south pole 90 at north pole)and it can be at least 0 degrees (equator). declination angle and latitude have a lot of common points, It's positive on north hemisphere and negative on south hemisphere.
–Vernal point most of time written with gamma letter or just "g", is more difficult to understand. on celestial sphere ecliptic plan (plan with both earth and sun) and celestial equator cross their way in two points , one cross when the sun is going from north to south hemisphere, and the another one when sun is going from south to north hemisphere, so when it's spring equinox (between the 19 and the 21 March).we will see that vernal point is not motionless. equinoxes moves about 50” per year along ecliptic from east to west. vernal point's time angle (or sidereal time) is read from greenwich meridien and is written ahso or ahgy. vernal point is almost moving with constant speed, this speed is about 15.04166 degrees . we will see that to perform our little software we will need more accuracy.
For celestial coordinates J2000.0 coordinates are the origin, in fact measurements read the first of january 2000 at noon in gregorian calendar. If we write a star's name in wikipedia for exemple, the most of time numbers noticed on the right of the page are those read at J2000.0, To have the good coordinates depending of measurement's moment, it's essential to add corrections.
b) Julian calendar, Gregorian calendar
Important to understand for our program; gregorian calendar is a little like a better julian calendar's version, the origin is the same, monthes and weeks system too. The difference is about bissextial year's choices. For julian calendar, there is a bissextial year each 4 years (2008, 2012, 2016…) and for gregorian calendar, more accurate there is a bissextial year if you find other conditions more. In our case we will only use julian calendar. In calendar ther is 12 monthes filled up alternatively by 31 (january, March, mai, july, august, october, December) or 30 days (april, June, September, november). There is one exception for february with 28 days for one year “normal” and 29 days for a bissextial year, so we have 365 days for a classical year and 366 days for a bissextial year, in fact an average annual number of 365.25 days with the Julian calendar. However this duration's time doesn't fit perfectly with a real year's time duration…So we will have to cope with this mess to find the best way to make a good program ! a funny work ! or not...….
c) What does it mean “a year” ?
A year in the Julian calendar has 365.25 days. But there are several options to decide what a year is:
–sideral year : earth revolution relative to a fixed point. It takes about 365 days, 6 hours, 9 minutes and 10 seconds.
–tropical year : time between two successive passages of the sun in the direction of the vernal point. This period will be very important for our program, including the calculation of the vernal point's hour angle. It takes about 365 days, 5 hours, 48 minutes and 45.26 seconds at J2000.0. For our century it decreases about 5.23 secondes each 100 years. There is a formula useful to calculate the average tropical year duration easy to find on the web, It's :
Average tropical year =365.24219052-61.56*10^(-6)*T-0.068*10^(-6)*T^2 263*10*(-9)*T^3 3.2*10^(-9)*T^4. In 2000 it's equal to 365.2421898 days and in 2100 it's equal to 365.2421291582 days. T is time in Julian centuries since J2000.0.
–anomalistic year : time between two successive passages of the Earth at perihelion. It's about 365 days, 6 hours, 13 minutes and 53 seconds. Perihelion is the moment where earth is the closest to the sun (Kepler's laws), so it's when earth is the fastest in its motion around the sun.
d) Motions able to change equatorial coordinates
Unfortunately equatorial coordinates will never keep same data (it would be so easy), They will change depending on 2 main periodic motions called precession and nutation. Precession is because of tide effects on earth rotation. It's a slow motion with a period of 26000 years roughly but with a high range because it can increase until 23.5 degrees roughly (able to change a star's declination until 23.5 degrees ). Nutation (here because of tide too) has a short period of 18.6 years with a weak range compaired to precession : 9 seconds only. So for our programmation, and also to simplify our work it's possible to forget nutation, we lose some accuracy at the end but it will be enough…
We will use those formulas for our work :
–General precession=p=50.290966 0.0222226T” per year, T elapsed time in julian centuries (36525 days) since J2000.0.
-p=m*cos(E)+n*sin(E), E average ecliptic's inclination (23°26’21.448” at J2000.0). m is precession for right ascension, n is precession for declination.
-p=5029.0966 2.22226T-0.000042T^2” per century.
-m=4612.4362 2.79312T-0.000278T^2” per century.
-n=2004.3109-0.85330T-0.000217T^2” per century.
Precession causes on earth a kind of motion “spinned ball with effect” compared with sun. Precession causes a polar star change too; currently it's polaris which indicates north but it will not be always that case.
d) Other things which bring a lot of corrections
We will find atmospheric refraction of course ( Snell-Descartes laws), and Bradley's aberration too, parallax, watcher's height compared to the sea level, the half-diameter's mistake (of our watched object). half-diameter's star (see right height) is forgettable because a star is very little seen from our position on earth; we can forget parallax too because of the very high distance between stars and earth, so parallax is very weak here. we can forget Bradley's aberration too…Fortunately at least we will keep the other things to have some results !
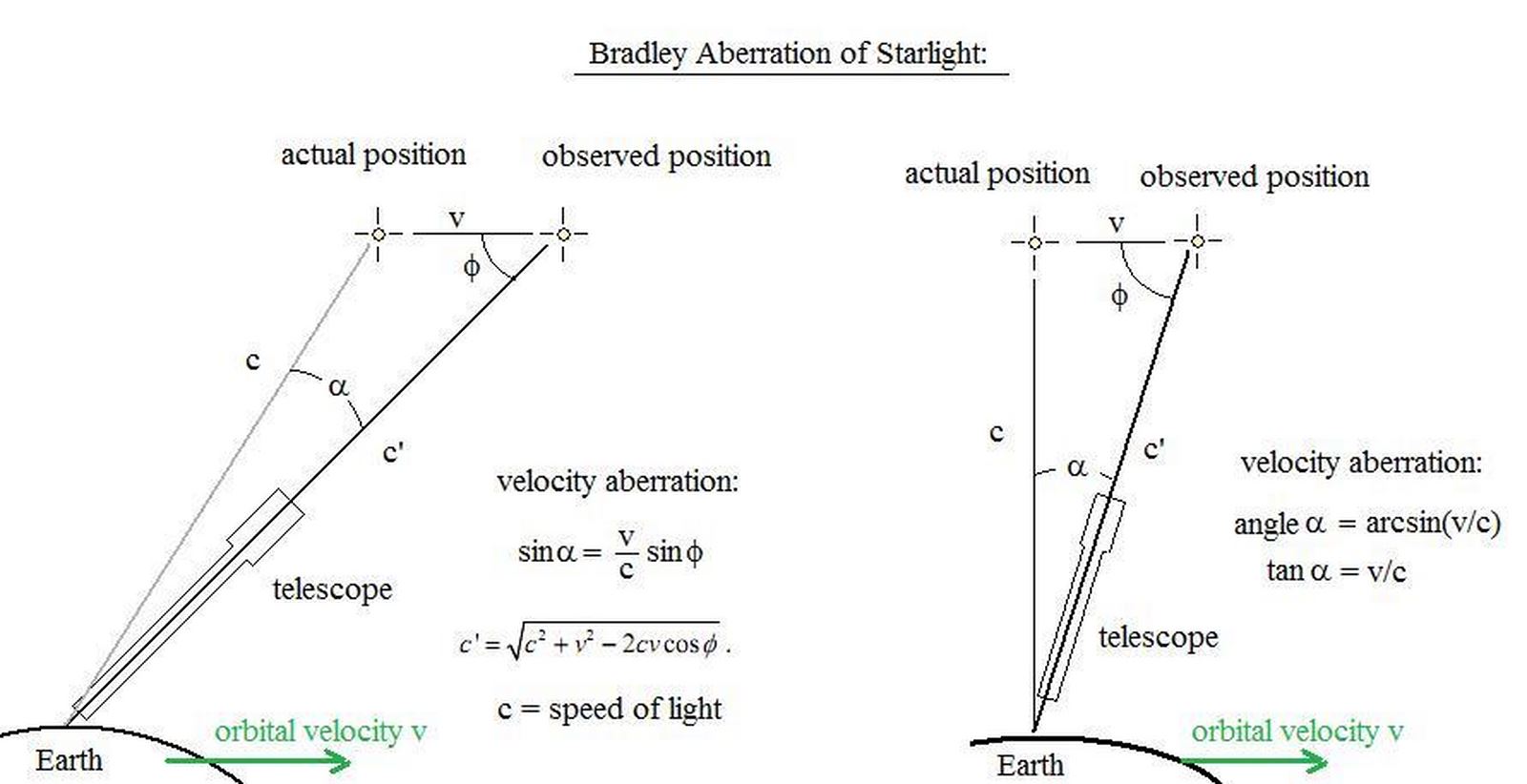
Bradley's aberration : This phenomenon exists because of limited light's speed (roughly 300000 km/s in vacuum) and earth's rotation around the sun (roughly 30 km/s , depends on its elliptic course). It makes in 1 year a slight rotation of all the stars around their “average position” on the celestial sphere; In fact a star is not motionless but turns around a little ring or ellips. Difference between the average position and apparent position is 20.5 seconds… It's not a high difference that's why for our work we don't care about it.
This difference is explained with those draws just above : tan(alpha)=v/c ; but on earth v=30 km/s roughly and c=300000 km/s. So tan(alpha)=0.0001, so alpha=0.00573°=20.6265”.
Little stories :
.It's difficult to see this phenomenon in his mind, so “a little draw is sometimes better to grab every slightest detail of it”, an analogy of situation can be handy. There is Bradley's analogy himself due to his navigations on Tamise, watching a flag onboard : he has noticed that flag wasn't nor in wind direction, , nor in boat's course but in a vectorial addition of them 2. It's the same for a star's position depending on earth 's speed around the sun and light's speed.
. Parallax can be used like an efficient tool to know approximatively distances between earth and planets, stars. For the closest stars parallax is under 1 second…So we will store and forget that it's not really important for us.
Atmospheric refraction's correction it changes depending on atmospheric pressure and temperature ; on wikipedia we find a formula to use when we are on the sea level, with a steadily atmospheric pressure of 1010 mbar with a temperature of 10 °C. This formula, is the same as the formula's master (it's the same but simplified) is written like this :
R=(1.02/tan(Hv 10.3/(Hv 5.11)))/60 ; R is refraction angle in degrees, Hv is the true height in meters.
apparent depression line, due to the watcher's height compared to the sea level is easily findable on a lot of web pages, written like this :
D=(1.77*√(E))/60 , D horizon's decreasing in degrees and E watcher eyes rising in meters.
e) How can i measure a star's height ?
It's the same thing than the height line with the sun. we have to use the vernal's hour angle , with it we will be able to win the star's hour angle ahl :
ahl = ahgy – g + AV (g is estimated point's e longitude, AV is verse ascension).
verse ascension it's the angle between vernal point's angle and star's watched meridian measured like a hour angle, from east to west and on 360 degrees ; it's used on astronomical navigation to point a star.
Right ascension it's the angle beetween vernal point's meridian and star's meridian, measured from west to east and written in hours. it completes 360 degrees of verse ascension. for exemple verse ascension in january 2016 for Betelgeue is 270.985 degrees . so right ascension will be equal to 360-270.985=89.015 degrees. the most of time when we are seeking about a star's coordinates on the web it's given with declination and right ascension, at J2000.0.
Clike the right height with the sun (see right height), formulas to handle for our calculations are those ones :
-sin (hc) = sin (L) * sin (D) + cos (L) * cos (D) * cos (AHL) ; hc is star's height calculated, L is estimated point's e latitude, D is star's declination, and AHL is local hour's angle.
-cos (z^) = (sin (D) – sin (L) * sin (hc)) / (cos (L) * cos (hc)).
– the star's bearing calculated is equal to z^ if 180°<=AHL<360°, and 360-z^ if 0<=AHL<180°.
-Intercept is difference between star's true height seen with sextant, and star's calculated height. Intercept = hv-hc. Intercept is written in miles.
For people who have resist until now in spite of this mess of formulas and unbearable calculations , a little funny story before the next part :
2) Our program
This program works for Dubhé which belongs to the great bear, but it's also able to work for any other star. you have just to replace values t (right ascension of the star at 01/01/16 at 00:00 utc) and u ( star's declination the 01/01/16 at 00:00 utc). this program works from 01/01/2016 at 00h00 utc to the year 2100 which is not a bissextile year (but this program considers it like this, and that is wrong).
1) part 1, change the date and hour in one workable number (line 1/line 36).
Until the line finished by , g (line 36), program will change hour, minutes, seconds, months and years of the watch in a single number called g. to find bissextile years we use a cosinus fonction (a periodic sinus fonction would have been the same); this fonction is equal to 1 every 4 years. When this fonction here called i= 1, we can see that e (day's number depending on the month) changes. Part with “elseif” find the ellapsed day's number in the month since 01/01 of watch's year until the moment of the watch.
int(365.25*f) find year's number between measurement's moment and 01/01/2016. int() is a fonction able to keep the integer part of a number, for exemple int(17.8)=17.
line 35 carves all our parameters in the same unit (the day), They are added up to find g. 2457388.5 (=2451545 5843.5) is the Julian day the 01/01/16 at 00:00.
2) part 2, calculate vernal point's hour angle ( line 37 / line 45).
Line 37, 100+5.5/60 is vernal point's hour angle ahso the 01/01/16 at 00:00 utc.
Lines 37 and 38, with g, we are able to calculate ahso when it has been measured . We know that the vernal point runs in 24 hours more than 360 degrees ; to have its average speed with accuracy we have to divide the distance ran (360 degrees of revolution bitween 2 equinoxes in 1 year) with time made to vernal's point to do it. This duration is the tropical's average year equal to 365.2421898 days. So (360/(365.2421898)+360)/24=15.0410686… In fact the average vernal speed per hour (for 2000. Elle decreases slowly every year).
Currently the average tropical's year decreases about 5,24 seconds per century, -0.0524*16/(24*3600*36525) is calculation for this decreasing time between 01/01/16 and 2016.
-0.0524*(g-2451545-5843.5)/(24*3600*36525) is calculation for this decreasing time between 2016 and the watch's moment.
Between lines 38 and 43, our program gives z (ahso) correct, because before this step z will be quickly higher than 360.
z>DMS changes z writting from decimal to sexagesimal shape (degrees , minutes, seconds).
3) Part 3, (line 46/line 76) calculated watch and intercept.
At the beginning on this step we change sexagesimal data of estimated point and measured angle in decimal data workable for the next calculations. In this program, i could have insert collimation and sextant's excentricity too but i haven't done it (it's a mack 3 model…). Lines 56 and 57 it's right ascension and Dubhé's declination the 01/01/16. Line 58 to 61 we use precession's equations to get Dubhé's celestial coordinates at the measurement's moment. line 62 caculates star's verse ascension at measurement's moment, and…for people who are still reading this article, still able to stand that a little break they deserve it ! (if it could also attract more visitors to the blog…)
So where are we now… well yes ;
program's rest uses formulas seen at the beginning. if fonction uses between lines 70 and line 72 gets true azimut. and now, the test !
3) Test
to manage a star's point we need several things :
-clear horyzon.
-An adjusted clock on UTC.
-A TI89, a programmable calculator or ephemeris.
-A sextant or a tool able to measure an angle.
-An offshore chart.
For me day of the test horyzon wasn't really clear, and i've used an old mack 3's sextant 3 so it wasn't very accurate. besides this it has been done on the english channel, so range of tide could have grown this lack of accuracy.
conditions have let me the allowance to do 3 measures, First on Dubhé, second on Polaris and third on Alkaid (handle's end on the great bear's shape). so finally we stay on 3 close's stars only, but at least it gives a little idea after all. estimated point e (chosen by any chance on the chart) used is 49°50′ North, and 1°5′ East. so e coordinates are positive (negative latitude if it's south, negative longitude if it's west).
Résults:
.For Dubhé, true height is 35°52′ watched at 22h 32 min 52 seconds (local hour, to get it utc we substract 2 hours) the 15/08/16. Program calculates that :
So when we use the map, we go from our estimated point e, then we draw our intercept ; from e to the star if it's positive, and from e to the same direction but the other sense if intercept is negative. then we can easily draw height lines, perpendicular with intercepts to define our triangular position. So our get point locate us at 80 km southward of Fecamp city (my chart was to small to draw my height lines)… and measurements has been made at Pourville next to Dieppe city… make this again with a clearest horyzon and a better sextant maybe, with more distant stars i guess.
This program works well for clestial coordinates corrections, for vernal's hour angle it's accurate at /- 1° (it makes a mistake's range of 0.3 % roughly). It works with an average tropical's year but it changes every year depending on a lot of parameters , like moon influence, the other planets. vernal's point speed is not regular but changes a little.
To improve it we could include collimation, sextant's excentricity, also doing things to get directly coordinates…have a better accuracy on vernal's point and take care about nutation, Bradley,captain's age…
Something practical to avoid spending too much time with calculations for navigation, especially when the sea is rough and when we have a heavy meal inside our stomach, ready to leave it, probably on the map to draw a new iland, or in the companion way : if we program a calculator before, we get more time instead of waste it inside the boat, it's less boring and the most of time we avoid some seasick problems.
on internet "l'almanach du marin breton" has published programs ready to be included in a TI83 calculator for the height line, the sun's height range, and capable arcs. For a TI89 those programs work very well, there are just one or two small things to do:
On the file, "E" symbol is not the exponential fonction. it's a kind of scientific abreviation : E^2=100, E^3=1000…And when we use it we don't write the "^"on the calculator's screen. In a program we always have to indicate every time the program's end “IF” by a “ENDIF” otherwise the calculator will score “syntax error” something like that. that's why on the line 2 of paragraph “celestial mechanics in the Julian calendar” the sentence does not end with “End” but “Endif”. in the program useful to get the sun's height range we have to add up “Endif” Missing for the program validity.
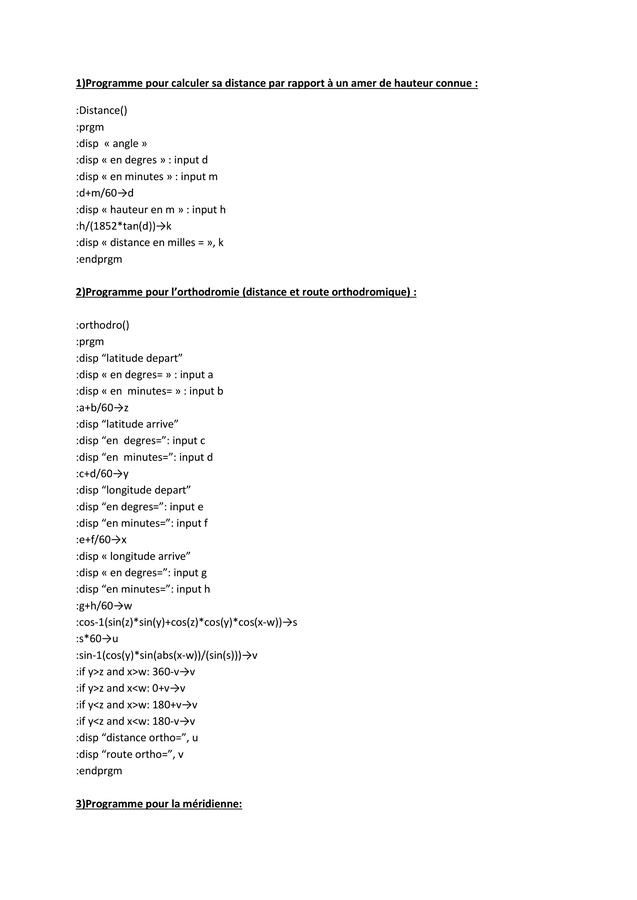
when we are looking about those programs, we are able to guess others like a meridian program, the orthodromic distance, orthodromic's angle, or a program able to give our distance from a seamark with a known height:
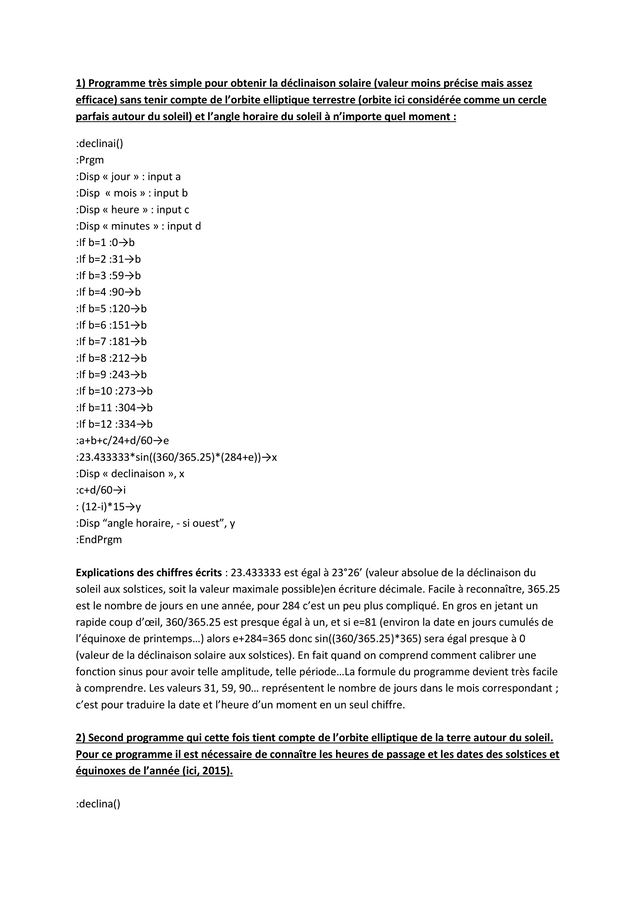
For the calculation of the solar declination, marin breton's program take care of the elliptic nature of earth motion around the sun (part: “celestial mechanics in the Julian calendar”) which gets involved in declination's evolution all the year, and begins from an accurate sun's point in the time. Nevertheless there is a simplified formula to get sun's declination which doesn't care about the elliptic shape of earth's motion but coniders it like a circle (in our reality it's almost a circle, its elliptic shape is very weak with an elliptic excentricity roughly equal to 0.017. a circle's excentricity is 0 to have a little idea). This formula, less accurate than the first one displayed at the beginning, is still efficient even useful and in the same time very simple!
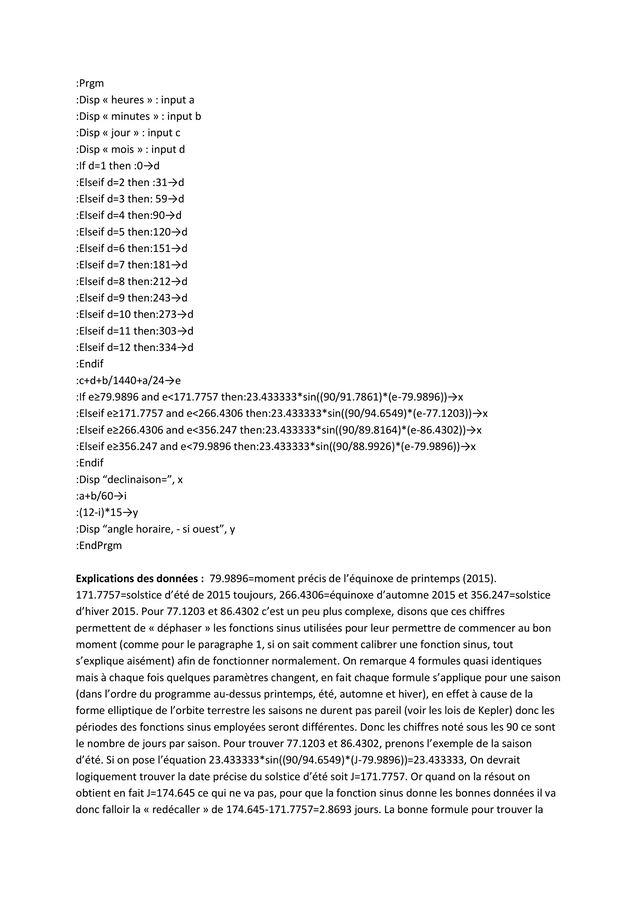
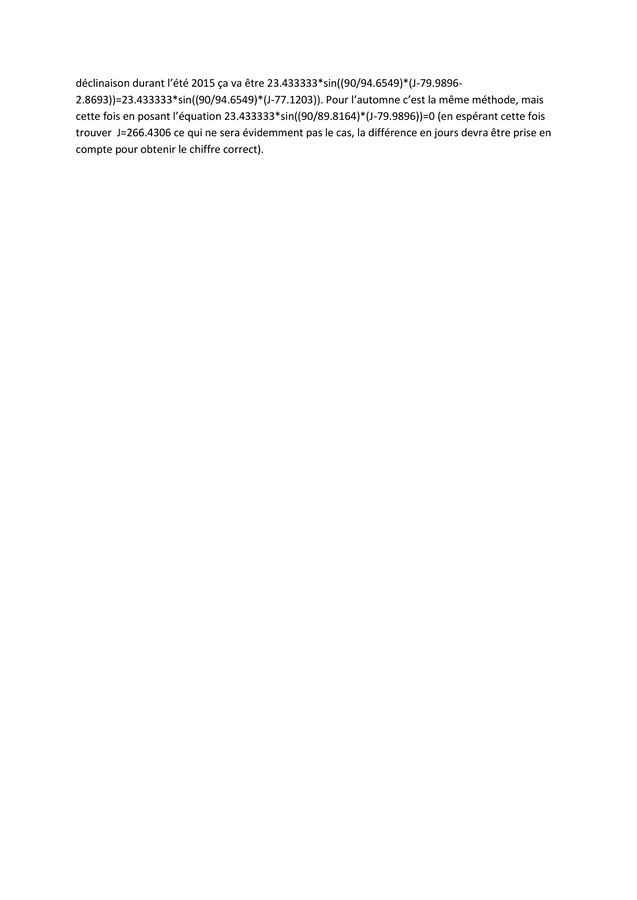
This formula is a precious tool to make a little sun's declination program depending on the day, the month, the hour (for 2015 when we compare it with marin breton's program difference is not overtaking 1 degree around mid-October, for the rest it's pretty accurate) without having ephemeridis on board. A second program allows us to have a better result (because we consider the elliptic shape in that way) :
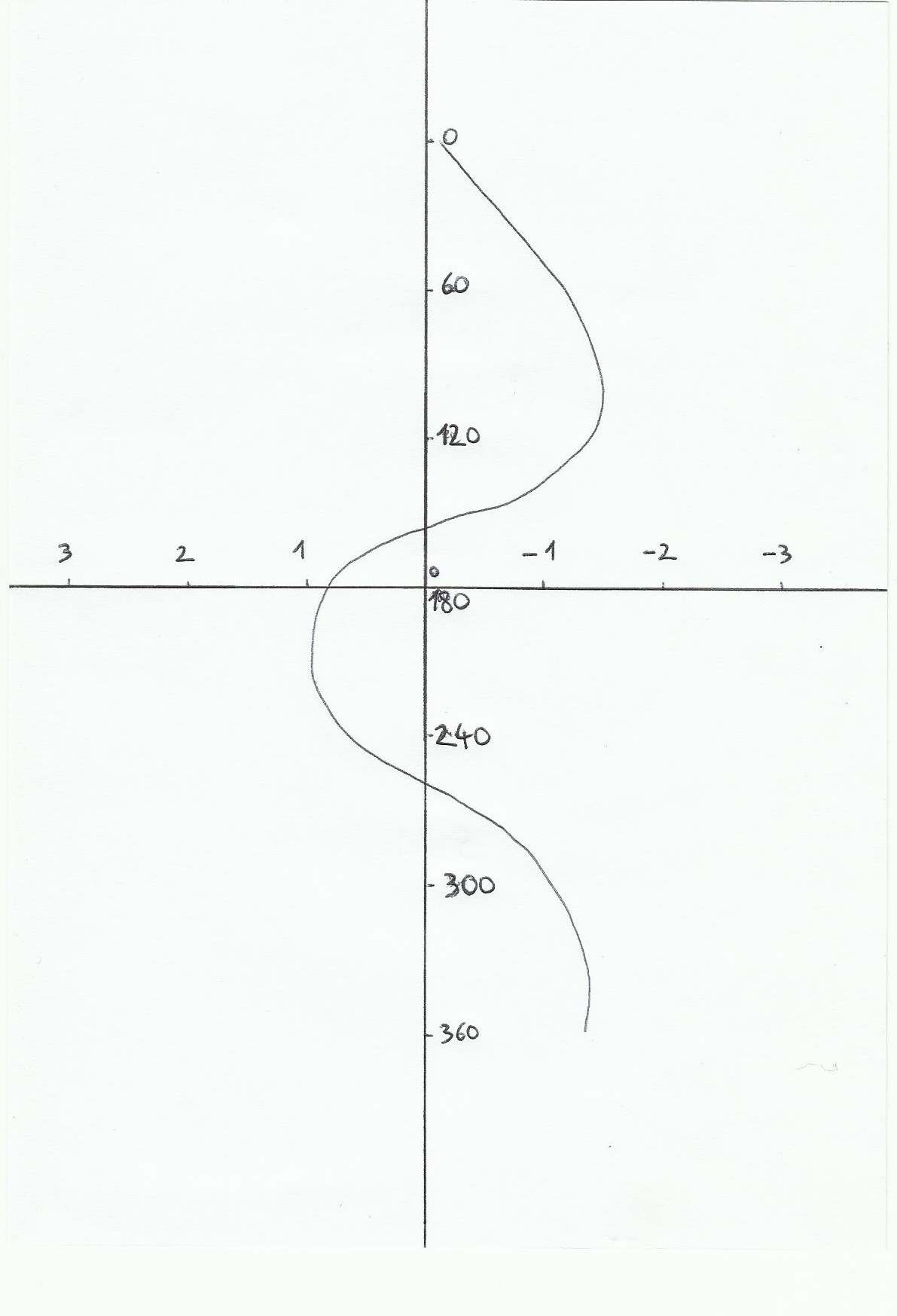
For those declination's formulas we use a sinus fonction because if we write year days and declination's values ina same coordonate system, we get a sinus shape. with a cosinus fonction instead it would be possible. for sinus fonction parameters, in fact how to cope with it to change its period, its range and its departure point it's quite simple : we will use this exemple : A*sin(B(x-H)). "A" parameter adjusts the range's fonction (maxi and mini value it can reach), "B" adjusts period because sinus fonction's period is equal to 360/B ( absolute value). "H" parameter adjusts the phase, For exemple the fonction y=sin x is an impair fonction with a symetry center which is o origin, so if x=0 then y=0. if now we have y=sin (x-3), then y=0 if x=3 so we will have shifted sinus fonction about 3 on the right on absciss line, we have phased it about 3 finally.
Normally on a flat surface the shortest distance between two points is the line passing on those points, Point bar. On a sphere such as the earth, it gets complicated ; then we will talk about rhumb line and orthodromy (see the page on the Mercator projection). The shortest distance on the globe between two positions is orthodromy : it's the path confounded with the half 's great cercle of earth, half great cercle is a plan which cuts sphere's center and two positions. the great cercle is a cercle able to be drawn on the sphere with a perimeter equal to the sphere. If on the globe we follow a road north / south or south / north( if we follow a meridian), or if we follow the equator way, we will be already on an orthodromy way, so for the next calculations displayed in those cases we don't care.
Orthodromy's exemple:
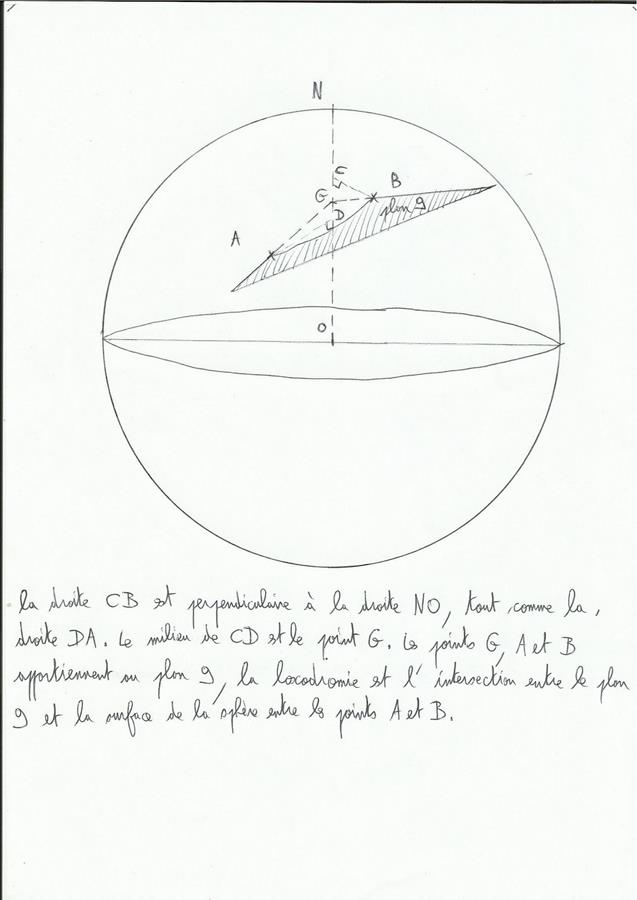
The rhumb line is the line that you draw on a Mercator classic navigation's chart (excepted courses which follows equator or a meridian), it cut meridians with the same angle every times. In fact, because of mercator's influence it's not the shortest way; if we would draw this shortest way on the chart, orthodromy, it would not be drawn like a line but like a curve. If we would be on north hemisphere it would be curved on north, and it would be the contrary for south hemisphere (the more we will be closer to poles, the more it will be curved). Basically orthodromy is an interesting problem for long navigations, rather close to the poles and more oriented east / west or west / east. in some few words, for a sunday's little pedestrian walk it's not useful to be focused on it.
Rhumb line's exemple:
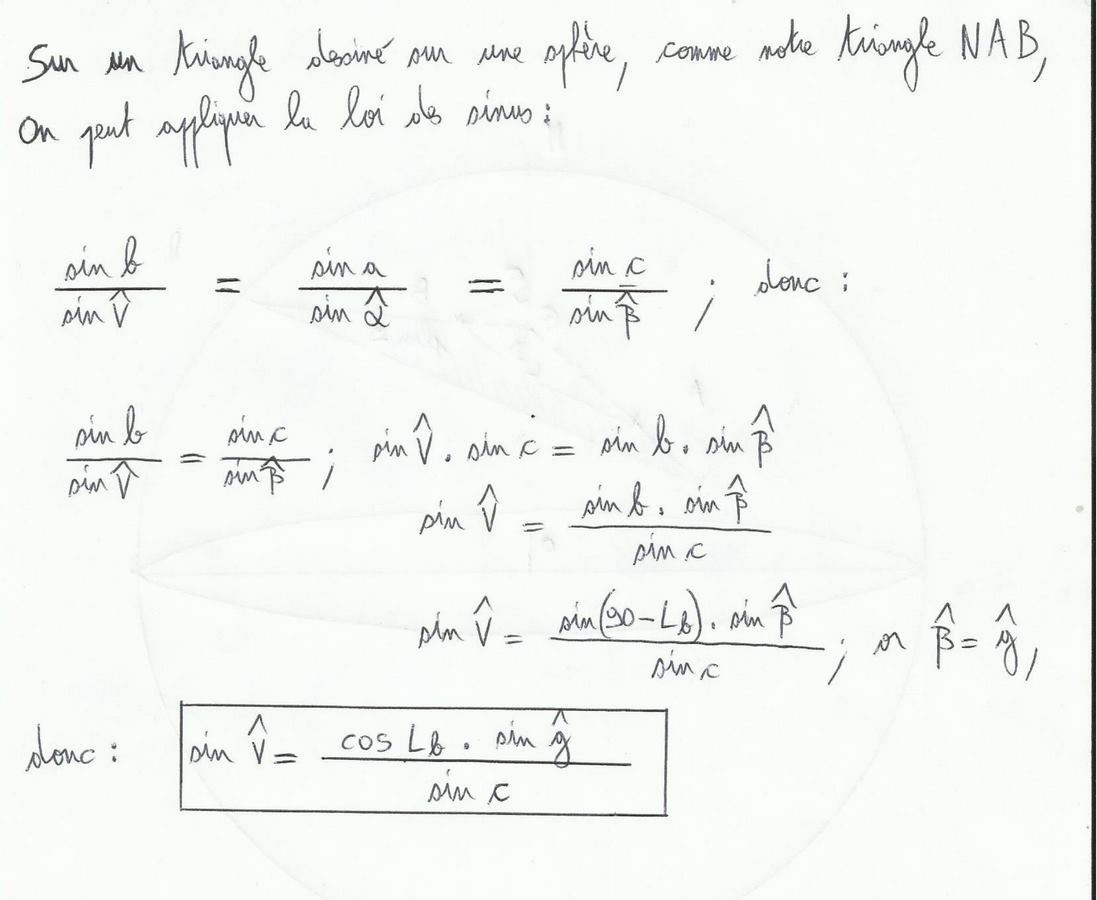
For calculations it's easy we will use the same tricks already employed for the height line : Pythagore, scalar products, trigonometry and spheric trigonometry. The only notion to add up is the sinus law (helpful to find the departure heading of an orthodromy way).
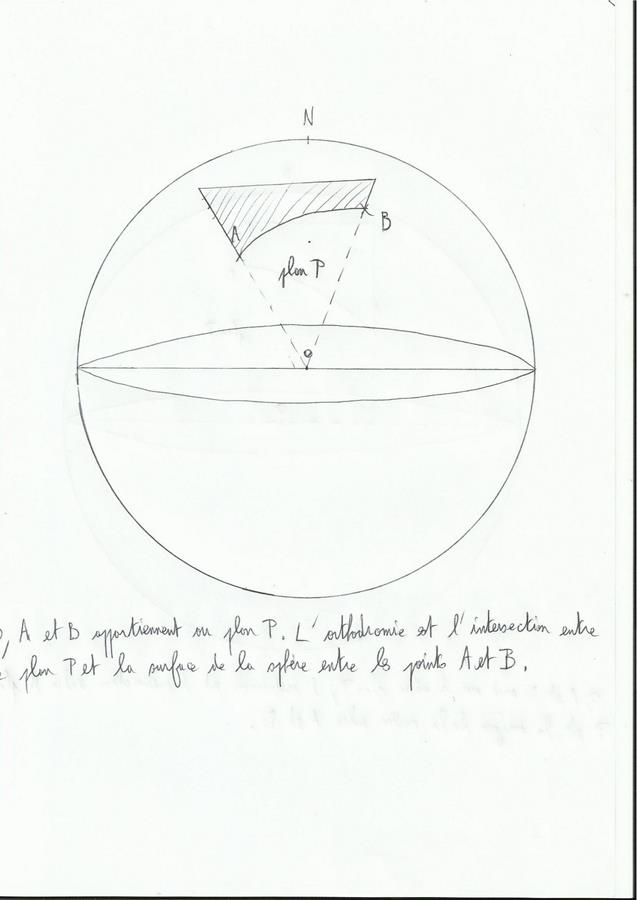
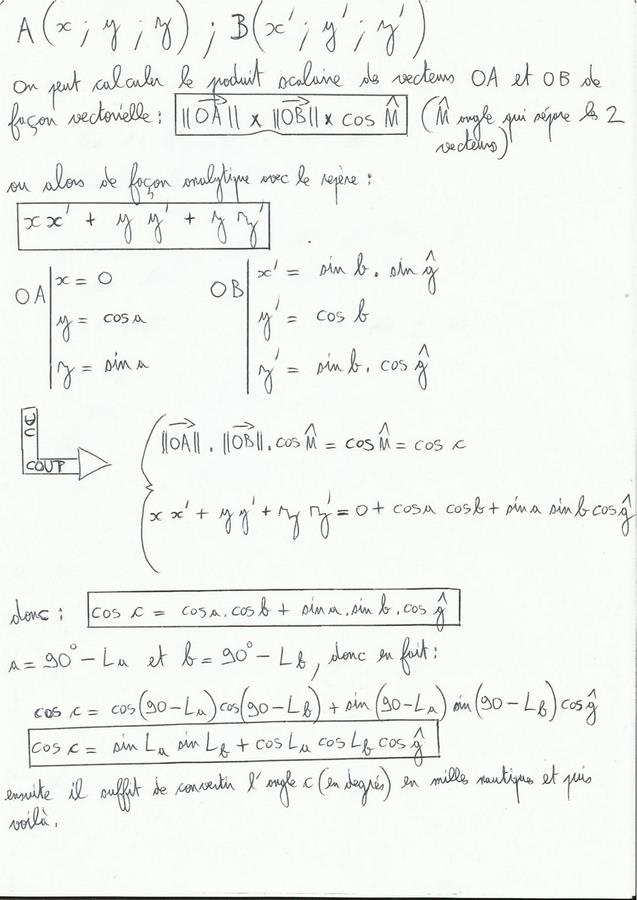
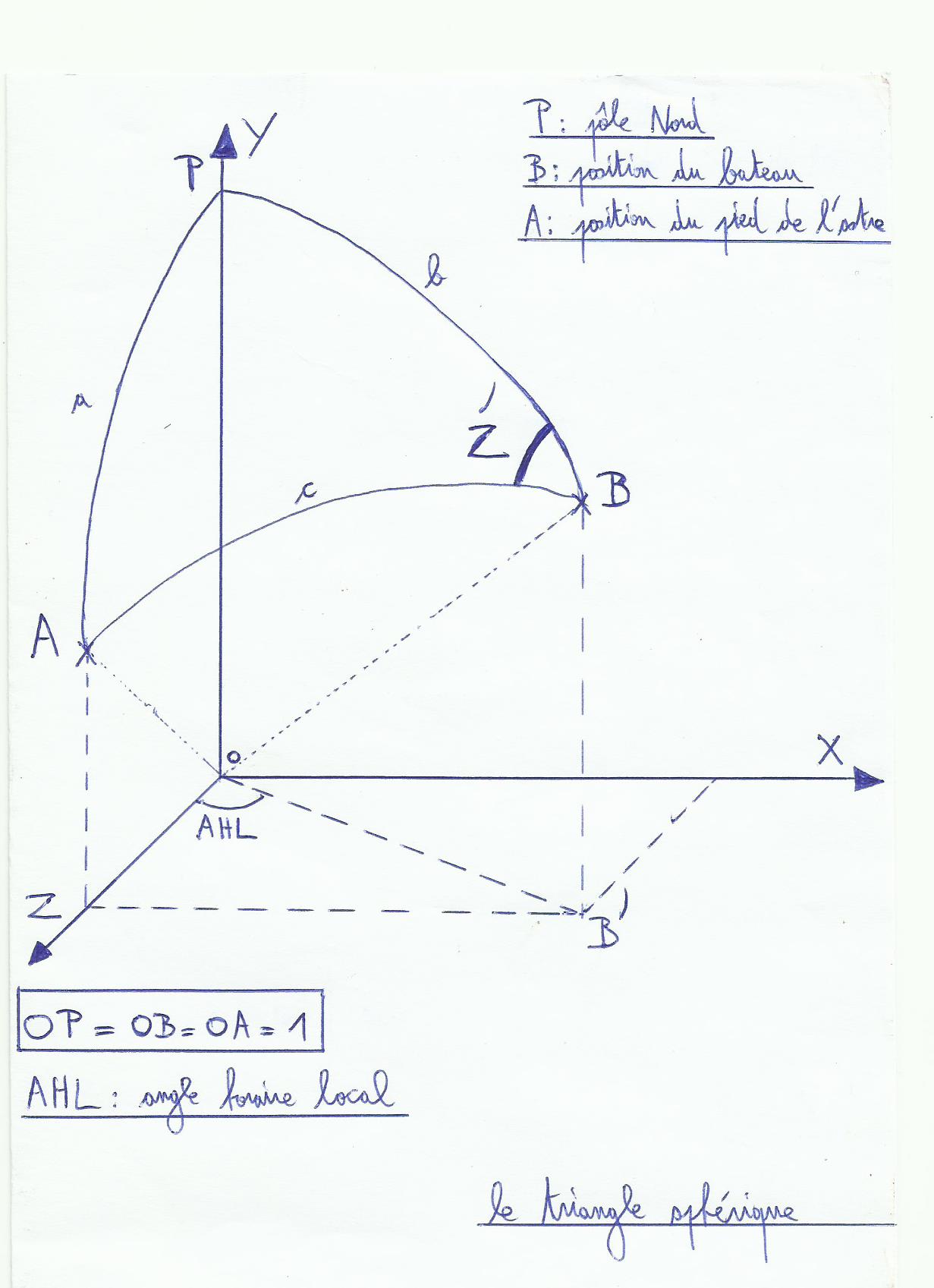
1) Orthodromy's distance calculation(on the draw, c distance, in fact M angle)
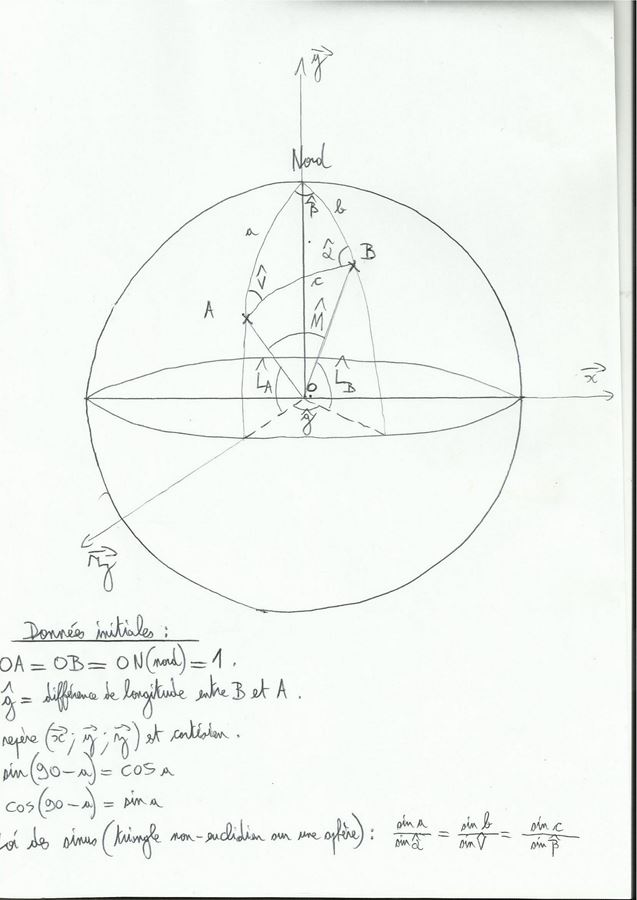
In the draw, we symbolise earth with a sphere with a radius 1, with an o center and drawn in a cartesian frame of reference (x;y;z) with an o origin too. points A, B and N (for north) are on the sphere so OA=OB=ON=1. A point belongs to plan (y;z), so it has o coordinate on x line. g angle is longitude's difference between B and A, g never overtakes 90 degrees . La angle is A's latitude and Lb angle is B's latitude:
2) V angle calculation
V angle gives the departure heading to use when we want to follow orthodromy:
In fact, during a navigation as soon as we have an accurate position we have to calculate this angle again to situate the boat precisely on orthodromy. In practice this is not always useful to follow before any reason this road, weather systems will usually be the priority. But try to s & rsquo; approach it on a sunbed for example can allow d & rsquo; save miles when opting for a composite road weather / orthodromy.
PS : in the Article “programming a TI89 for navigation”, there is a small program given to calculate the great circle distance and the & rsquo; angle V. Well it sucks…With the & rsquo; d & rsquo assistance; a good book (high seas of olive stern-Veyrin) j & rsquo; as did another that compares more the gain between the great circle route and rhumb, and calculates the vertex.
The program below gives indeed the absolute value of the vertex in latitude, longitude and distance relative to the starting point, only on well oriented roads east / west. It gives an approximation of the rhumb line (distance), there is a more precise formula (see wikipépé) but I don & rsquo; have not succeeded in the program.
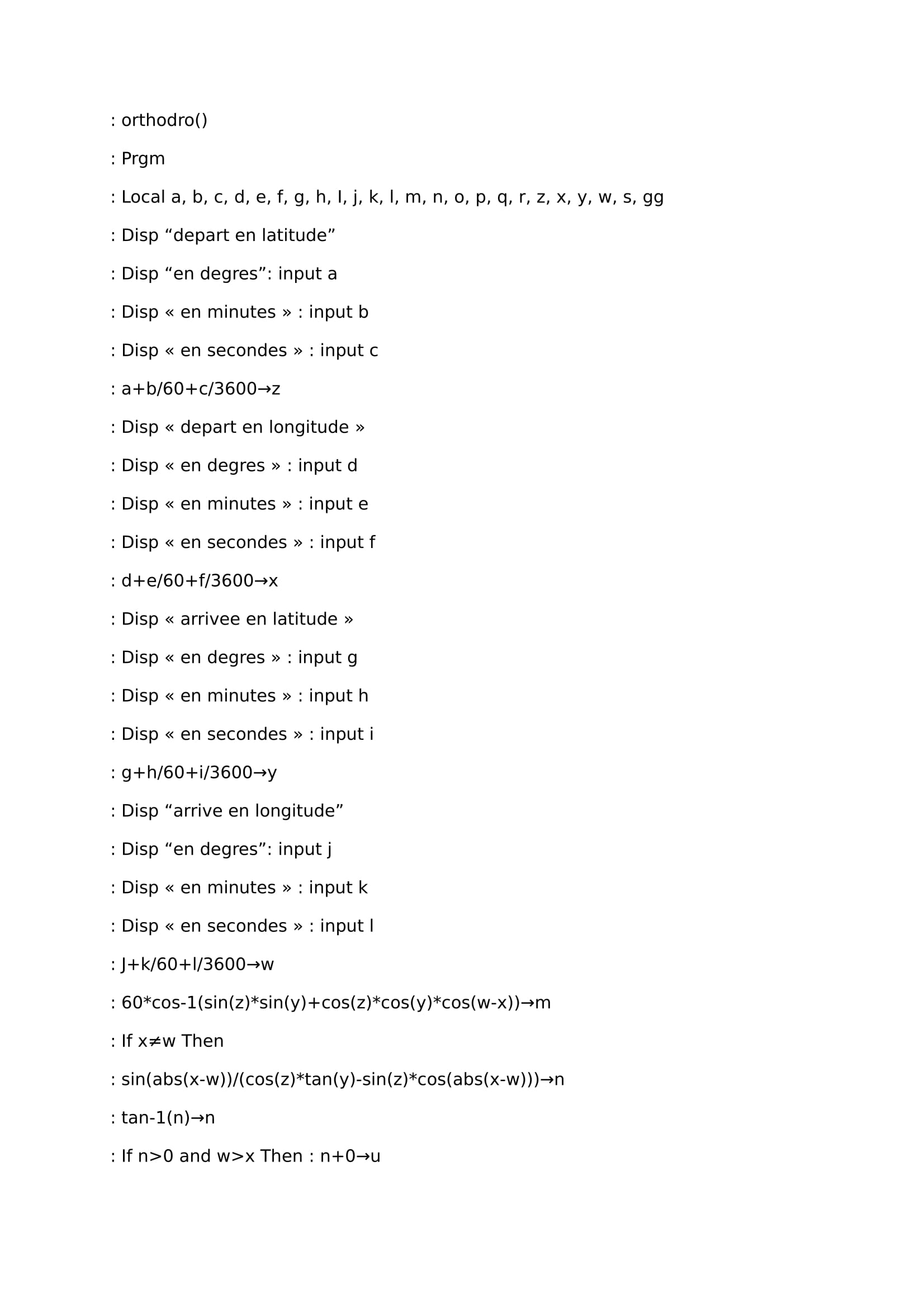
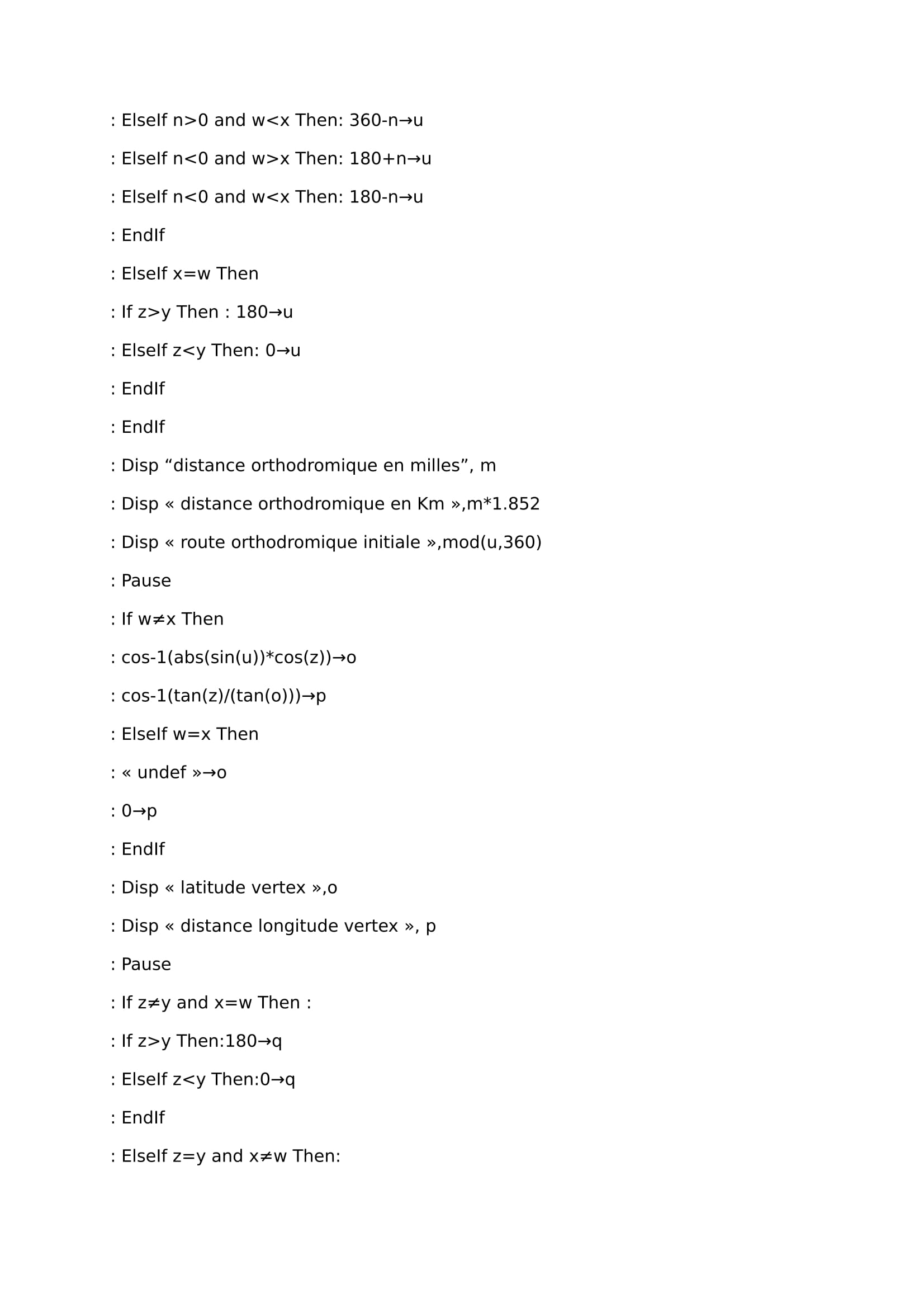
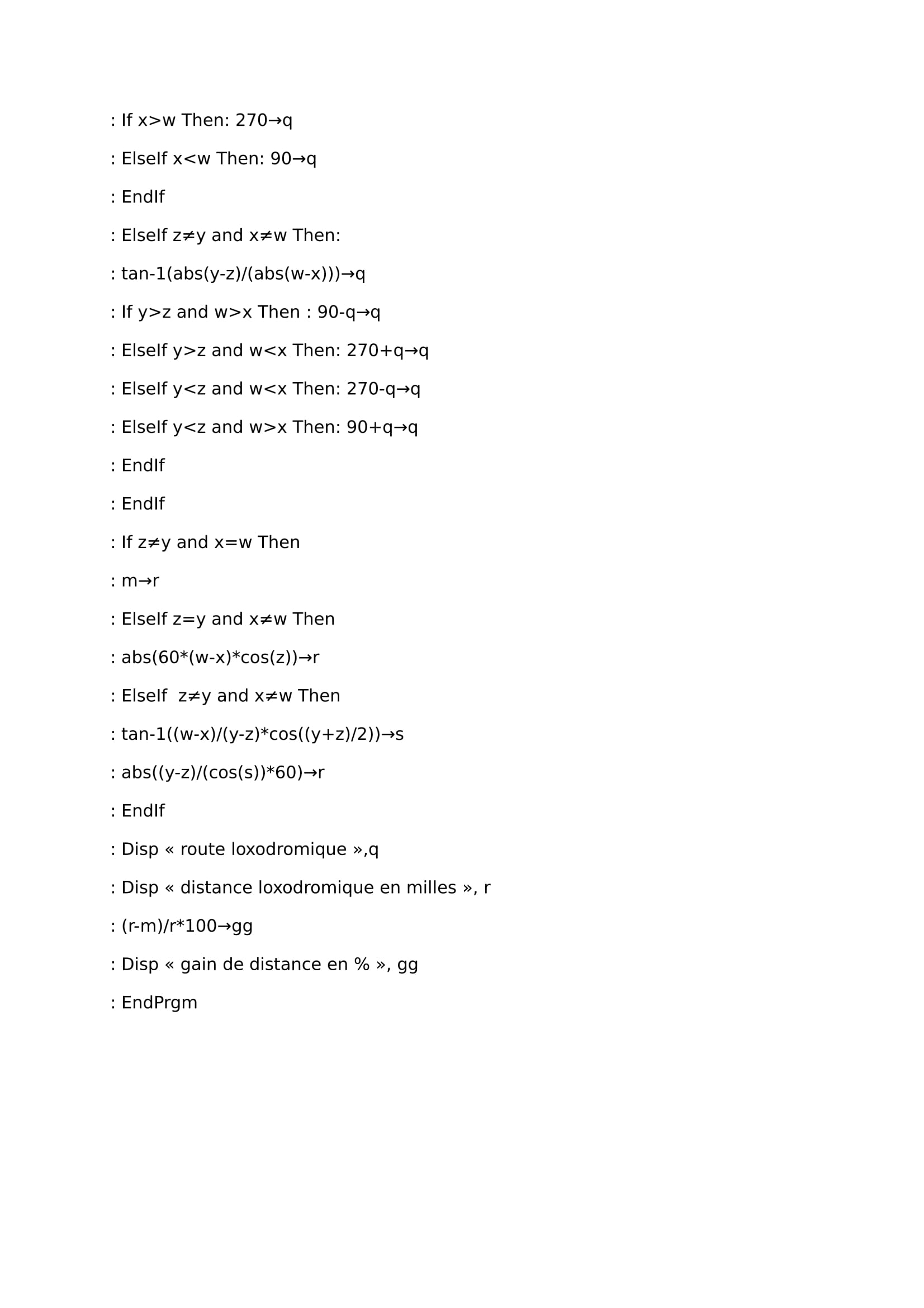
Calculation program of & rsquo; orthodromy:
J & rsquo; have verified the proper operation of the program with the site “https://www.aero-training.fr/calculer-une-orthodromie.html”. it works very well to the great circle distance and bearing great circle, as the course of the rhumb line. For remote rhumb remains accurate but it loses precision beyond 400 mn.
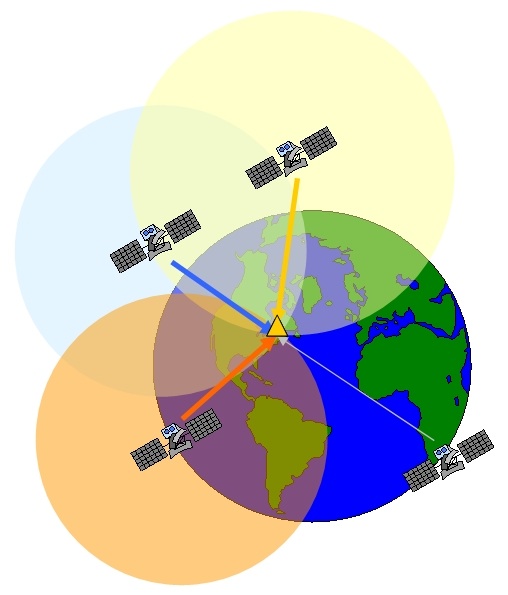
Quite easy to use(you press a button and pouf you have your position), the gps device is more difficult to understand, the main thing is that it will use the time as a measure for determining distances(between us and the appropriate satellites)and by intersection of these distances(like a point 3 of 3 bearings)it will display our latitude and longitude. Currently the number of satellites used for this system exceeds 24, and they orbit the earth at approximately 11000 miles. There is much to be sure that at least three are visible at any point on the earth at the same time. We will also see that the gps involves the laws of relativity of Einstein to obtain the best accuracy, no no this is not bullshit!
1) A three bearings point in 3 dimensions
In coastal navigation when we do a three bearings point and we draw it on the chart, we work on a 2 dimensions plan.
For positioning with gps it is the same idea except that here we work in 3D. A satellite's bearing will not store us on a straight line but on a sphere with the satellite as it center. The intersection of these three spheres indicates two positions, one on earth and one outside which will not be kept. The compass bearing gives us an angle and the satellite gives us a distance.
In this diagram we see the presence of a fourth satellite, so what it's doing there ?
The measurement of the distance between the satellite and us is the product of the light's speed(speed signal, 300000 km / s in a vacuum about)with the time signal reception, So to get an accurate measurement of this distance it requires that the internal clock of the satellites and the receiver are synchronized together and very accurate. If a satellite sends a signal at time 1 and gps catches it at time 2, travel time so the distance can not be known only if the clocks are synchronized, if they are not traveling time is wrong and finally calculated distance is false.
For a nanosecond precision satellites are equipped with atomic clocks , and they are all synchro between them. Problem: an atomic clock costs the skin's bottom, an arm, head's eyes and a bag so it wasn't possible to set it up in each gps. We have found a parade, gps is adjusted depending on satellites clocks with the help of a fourth satellite. If gps clock is well adjusted, the positioning sphere of the fourth satellite must cut the others in the same place (the small triangle in the draw). If this is not the case, gps corrects the time of its clock to find that, crazy, isn't it ? actually the gps not only gives an accurate point but also the time with an atomic precision because it constantly adjusts its time with satellites, equipped with atomic clocks.
2) Everything is relative…
As we have just seen the principle of GPS is based on measuring the travel time of electronic signals traveling at the speed of light, so it is important that clocks on earth and on satellites are synchronized, or the use of a fourth satellite is not enough…because the local time of the receiver( gps) and satellites do not evolve in the same way especially because of the wide difference in speed between them, in short it's the mess.
a. Relativity
It challenges the notion of absolute time. Previously it was believed that the time followed the same way and at the same speed throughout the universe and for everyone, and that the speed of light was infinite. In fact this is light's speed which is an absolute concept and limited, time is relative to the subject according to its speed relative to the speed of light. The twin paradox(also called clock paradox)illustrates the problem. We take two twins, one is dropped in a spacecraft able to move at a speed close to the light, and the other stays on earth. If the first goes to buy bread on Osiris (an exoplanet used for the exemple)by spacecraft, he will come back younger than his twin brother who has stayed on earth! To understand the phenomenon bravest will investigate the equations of Lorentz, well explained in the book “relativity” of Einstein, or on youtube there is an episode of the fourth dimension that sum up this thing. This is only valid when the speed differences are close to the light's speed, we're not going to age more slowly by doing 300 km per hour on the highway! Its's more the contrary…
Gps satellite moves about 14000 km/hour, therefore its speed is not negligible compared with light's speed…
Simple equation to notice this:
S=√(1-v²/c²)
S is the contraction factor, indicates the relative changes of time and space of an object at the speed v. For our spacecraft which is turning at 150000 km/s it gives:
S=√(1-150000²/300000²)=0.87, time in the shuttle will evolve at 87% of reference's time(the earth), so the time in the shuttle will run 13% slower than time of the Earth.
For our satellite that moves very quickly compared to our gps receiver that create a small but significant shift of 8 microseconds per day of delay in relation to our time.
b. General relativity
Everyone knows the Doppler effect, particularly the police that uses it for money… motionless in the street, If a motorcycle is approaching us the engine noise will rise in high pitched, and when it moves away from us that turns in deep.
If sound's speed in air is known(approx 340m / s)it can be possible to calculate car's speed. In fact this effect also works with light! and as the speed of light is related to the time…This is still the mess!
In our case then we'll talk about gravitational Doppler effect(to manage to fix it in a sentence during a conversation it's hard), explanation: the light may be seen as a form of data transfer via photons, particles without mass thus capable of reaching the maximum speed of 300000 km/s . But even massless photons are deflected by gravity, and gravity is equivalent to an acceleration. Further light is both a wavelength(as sound…)and a particle movement. Conclusion: a gravity field accelerates photons and increases frequencies of light. in fact light frequency will be increased when the satellite will send its signal to us, and it will be slowed down when the signal goes from the bottom to upwards due to gravity. In fact the strongest gravitational field on earth slows down light and therefore time relative to the gravitational field of satellite.
This principle of general relativity causes a shift of 46 microseconds per day between our local time and satellite's local time(46 microseconds to substract for us ).
The GPS must correct per day a shift of 38 microseconds roughly, otherwise it would loseevery day 12 km of accuracy!(299792458 m / s multiplied by 38 microseconds gives almost 12 km) Despite its ease of use, gps finally uses complex concepts.
Sometimes when the gps has a lack of energy, and when navigation in areas with highly variable depth, including an high presence of submerged rocks or close to the surface, all sprinkled with a large tidal range, it is important to know how to avoid the dangers. It is always best to know where we are not rather than don't know where we are!
1)Marks
To find our position on the water we will use mostly visible marks, noticeable(avoid as much as possible buoys, moving around their chain origin) and clearly identifiable, landmarks and seamarks(for example lighthouses, poles, chimneys…), and sounder. Marks chosen must be noticeable on the chart and especially not taken for an another(careful when you choose a water tower…better to avoid when there are plenty in the area). In non-tidal waters sounder allows us to directly write our position on the map with the lines of sounding, with tide must be aware of the calculation of the tide and add it up with sounder informations.
2)Tools
With the help of these marks and sounder we will be able to find our position on a point or an area of the water, there are several tools for that, I have classified them from the more accurate to the less accurate.
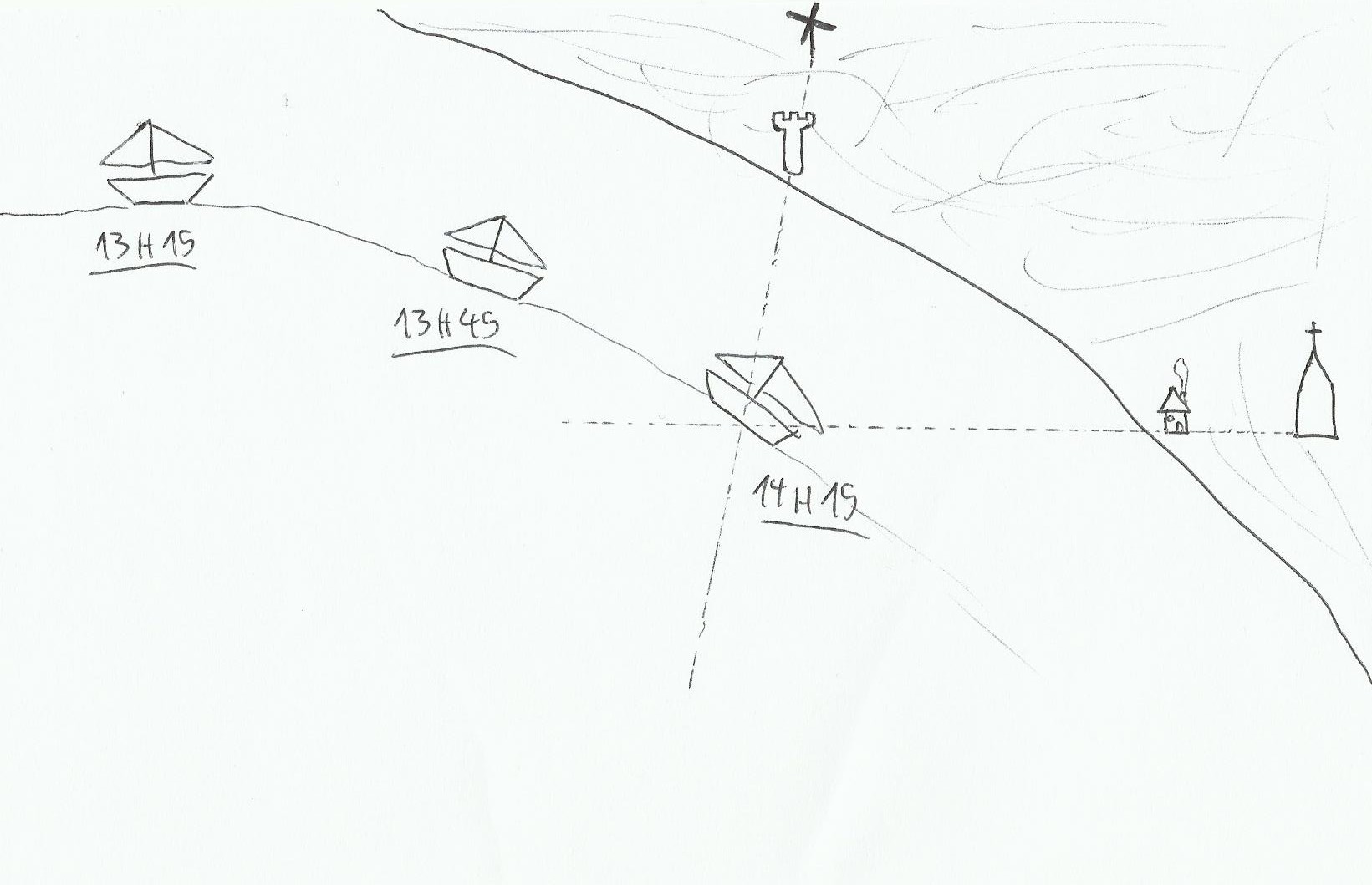
Two transits: when two transits of two marks each observed simultaneously. It is rare, but we can then draw on the chart our position easily(at 14:15 when the two transits can be seen, we can have our position very precisely).
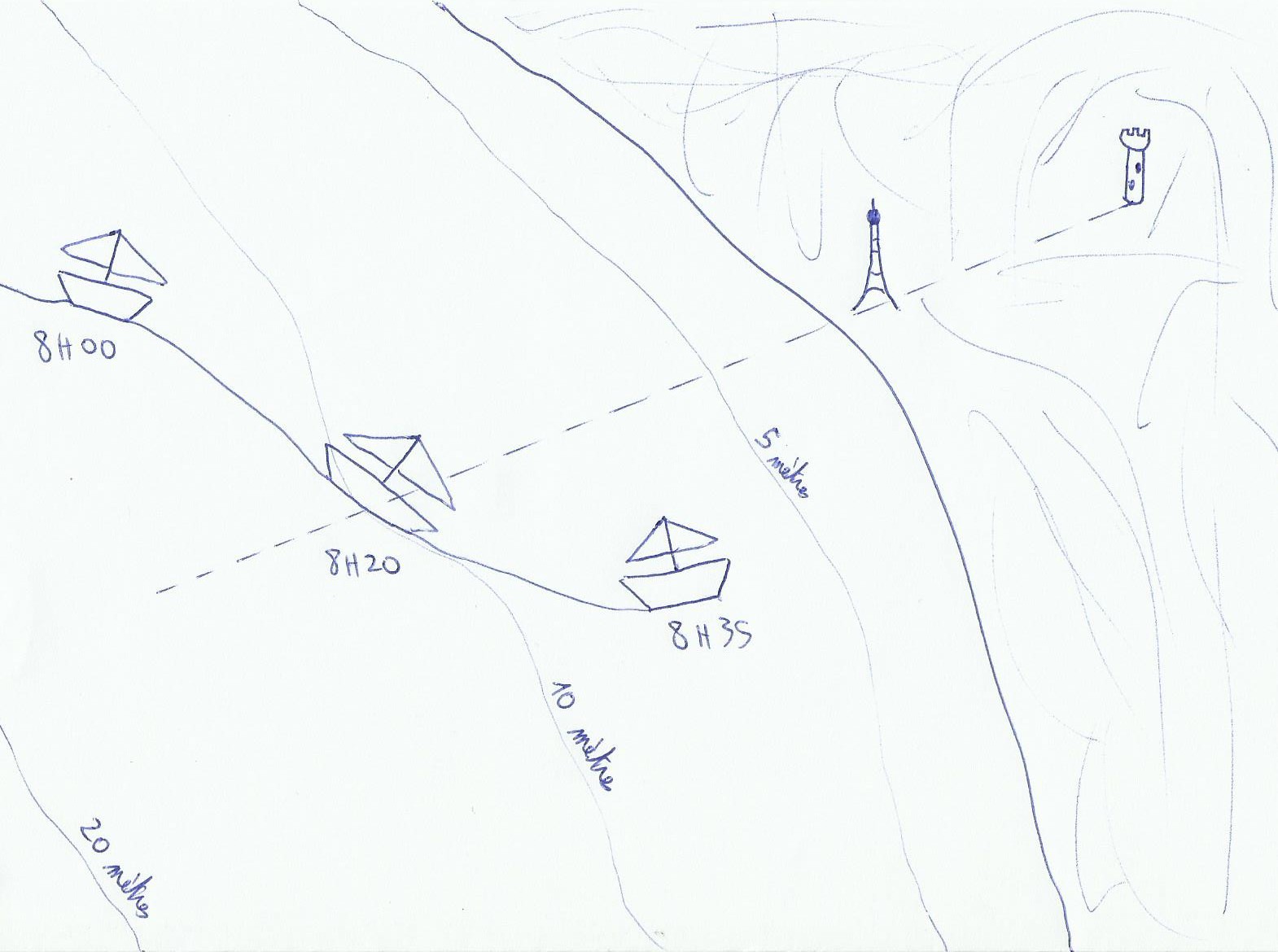
A transit and a line of sounding: in this case, a transit of two marks is noticed, and at the same time the sounder indicates a passage on an easily recognizable depth on the chart.
at 8:20 am, sounder tells us 10 meters, position is known(in tidal waters don't forget the tidal range!).
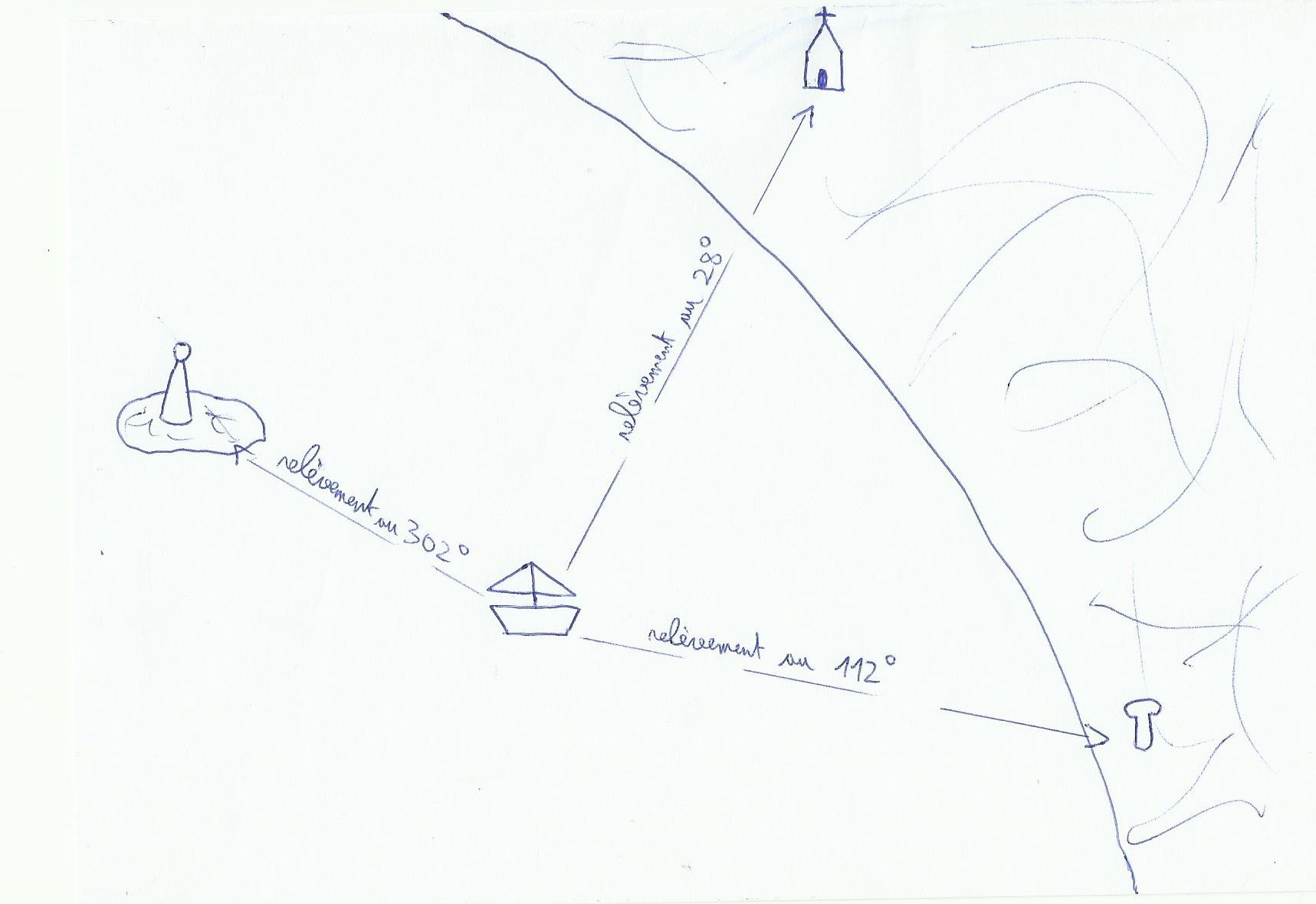
A range and a bearing: this time we will use the hand bearing compass. For example we are following a range(so it is a running range called a leading line too)and we notice an isolated landmark on starboard, northward of us precisely.
A point with three bearings: the more the three landmarks are spaced(in the best case, 120° between each landmark, then it's Christmas time!)the more the point will be more accurate. The lines of the three compass bearings on the chart is joined at best on a single point(rare), if in general it forms a triangle positioning called cocked hat, we live somewhere in this triangle(. To check the truth of the point we can take a look on the sounder.
2)Avoid hazardous areas
Transit: we say that a range is opened right when the farthest mark is on the right hand of the closest mark, if it is left open, it is left hand. When we talk about open range, this is not a steering range but a safety range. In fact in this case when it's close, he tells us we have crossed a safety line to go into a dangerous area. we will have to move.
In zone A, which is without danger the range is open right. Approaching the area B it will close itself gradually.
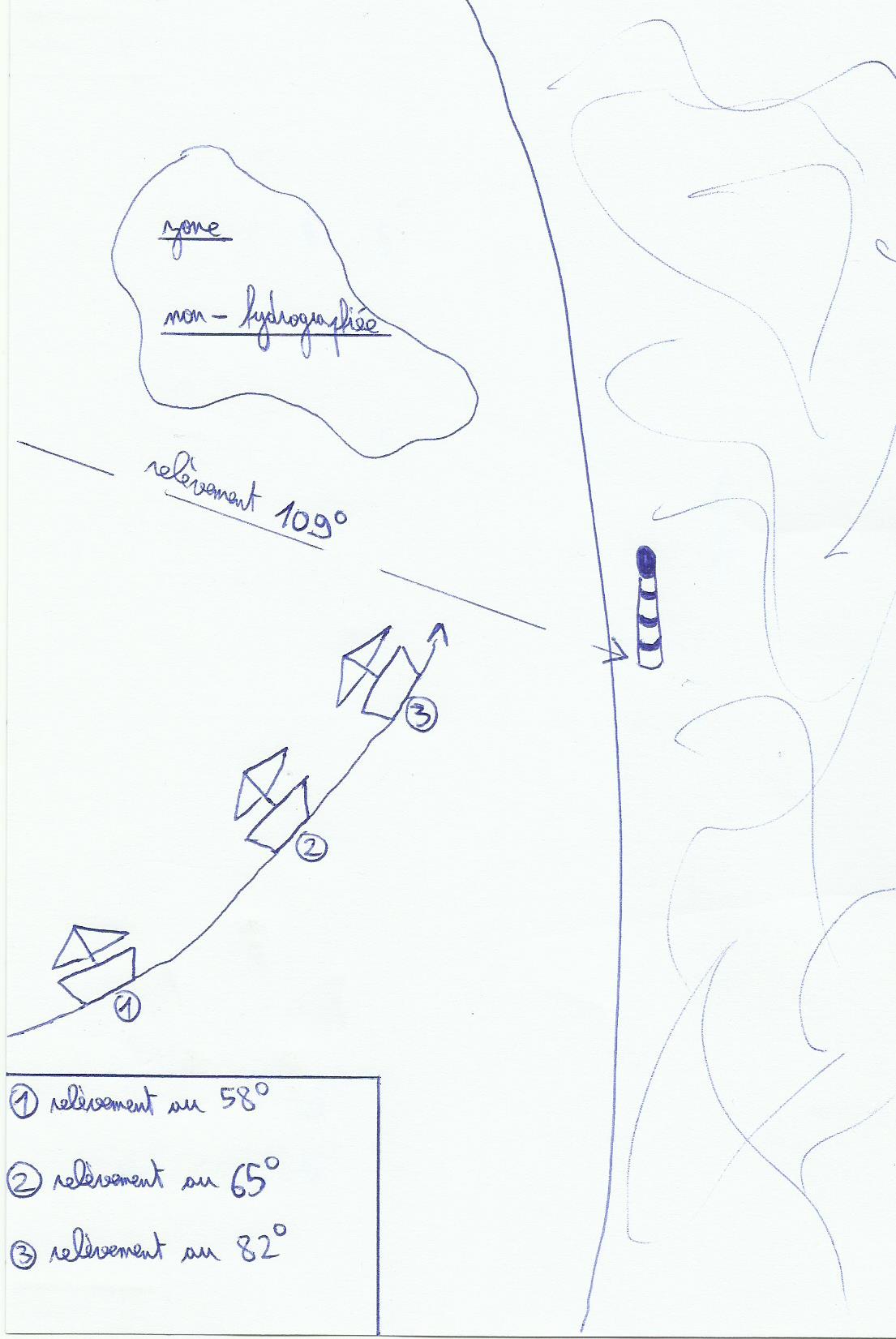
compass bearing: a compass bearing is sometimes useful to avoid a dangerous area.
We foresee a little safety margin, it gives us a bearing of 109 °. It means that if the compass bearing exceeds 109 °, we are too far northward of it(the mark we have used), So we are in the non-hydrographiée area.
Sounding: The sounder can allow us to avoid a hazard if it is surrounded by a clear sounding line and significant enough away from it.
A 15 hours we know that we enters in the area between 20 and 10 meters.
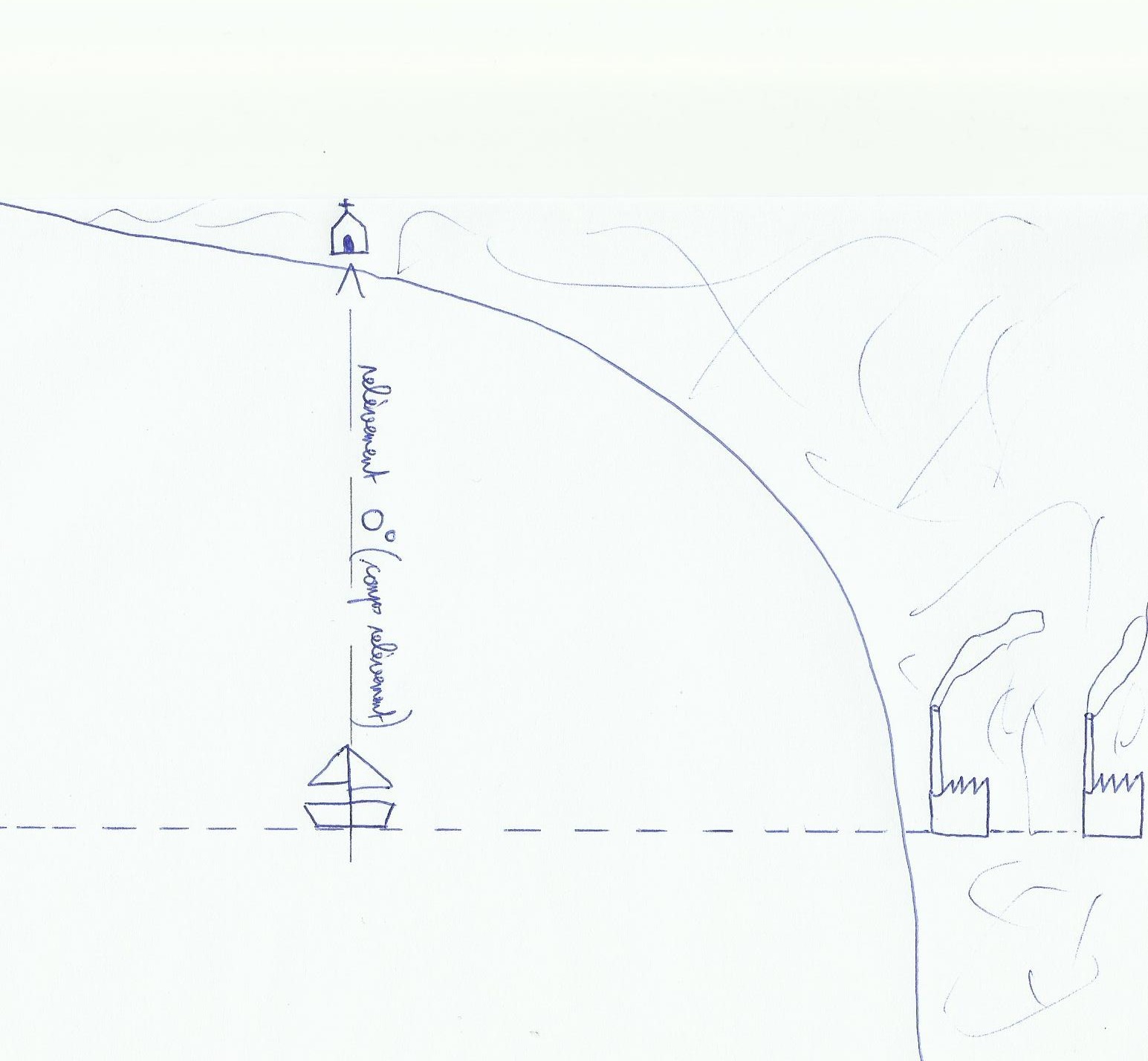
If there is no sounding line around the dangers for example around a lighthouse, an island or an isolated mark, you can use the height of the danger(if it's written on the chart), lighthouse or mark in question:
In fact we will just use old(and boring) Pythagore rules learnt at school, finally it's sometimes usefull! If we forget 1852 in the calculations distance away from the mark is given in meters. Knowing that the tip of the index makes roughly an angle of 0.5 ° when the arm is extended on the sky, so we are able to find the alpha angle without the help of sextant. A lighthouse of 25 meters of height hidden by 4 fingers provides an alpha angle of approximately 2 °, it means that we are approximately at a distance of 720 meters from the lighthouse. A lighthouse of 30 meters seen at 2 ° gives a separation distance of 860 meters roughly.
3)Useful tricks
Compass bearings: when the hand bearing compass is used, it must be not surrounded by any electronic device(less than 1 meter roughly)(speakers, electromagnetic things…)or cables which may affect the magnetism, and at the same time informations on our compass. you have to keep in your mind that the more rough the sea is, the more the result of the measurement will be inaccurate, and between the compass bearing and the line drawn on the chart, the boat will keep its way, so unfortunately the information transcribed on the chart will not be "live"…To draw a bearing on the chart the most of time we consider the variation only(true bearing compass=bearing compass variation + declination).
For an accurate cocked hat, we will take the bearings of the three landmarks in a specific order. D & rsquo; first one who moves the least with respect to the direction and speed of the boat(l & rsquo; most bitter on & rsquo; back), then the one that is more abow, and finally the most through. The center of the gravity circle of the triangle's cocked hat is considered as our position.
Transits, or marks search: if marks sought are located between the sun and the observer(by delighted and clear weather), it is very difficult to identify them. If the chart indicates a steering range to follow and we are not sure about marks noticed on the landscape, if we have them in line and in the same time watched beyond the hand bearing compass we are able to know then if it's okay or not with the data of our chart. For an accurate transit the closest mark must be downer than the other one, to have a visible sight .
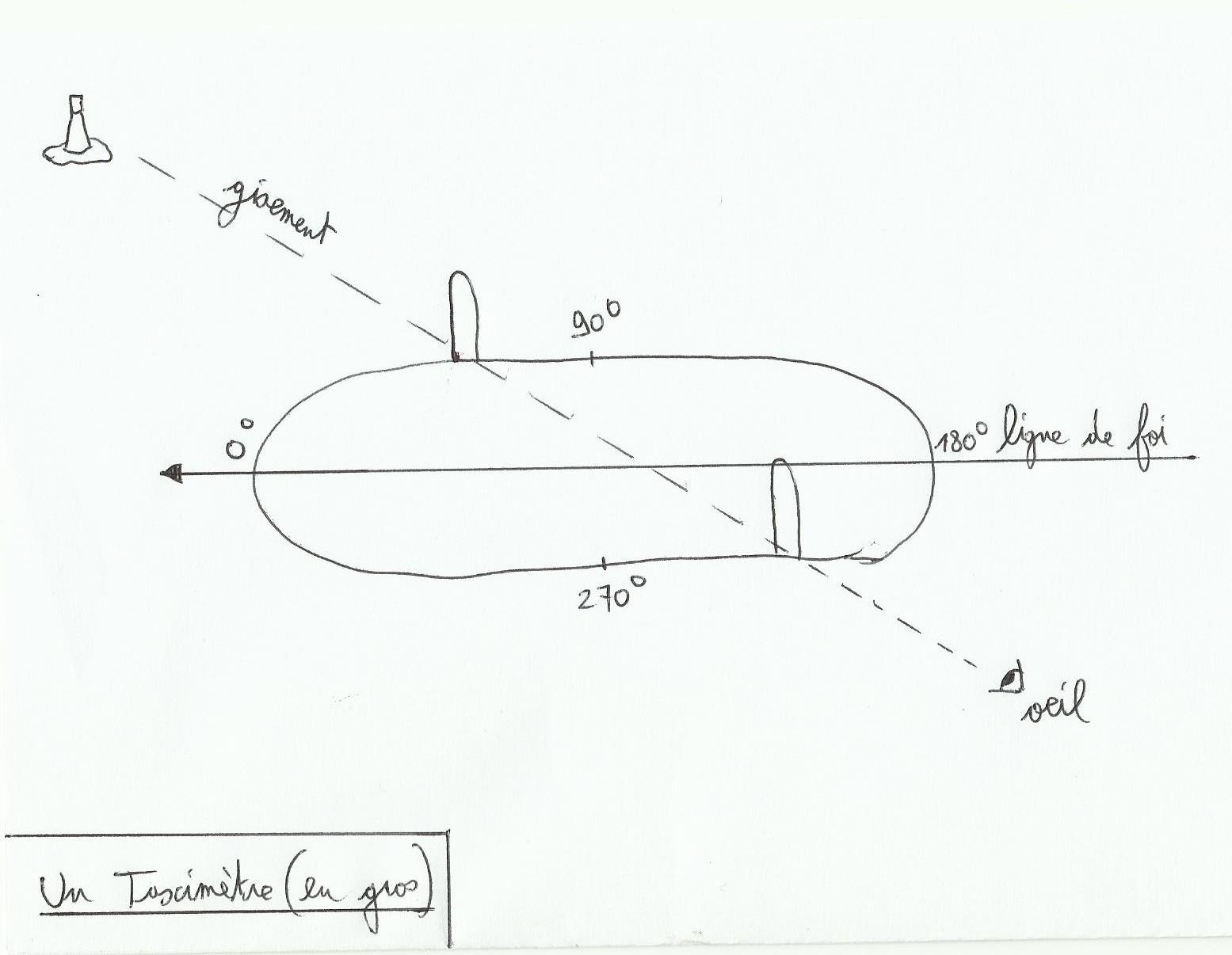
Relative bearing: sometimes when you're too lazy to use the hand bearing compass, or when it was dropped in water, we can cope without it with this method. The relative bearing is the angle between the mark and the bow of the boat. In fact True bearing compass=true heading relative bearing + nothing. To find the relative bearing it is possible to establish benchmarks around the boat, each giving you a defined angle. You can also install a taximeter.
The taximeter is an instrument fixed at the center of the highest place aboard, its axis is the length line of the vessel and an alidade(like a sextant)is used for angular measurements.
The tide affects the water level during the day, more or less according to area navigation. The most of time in one day there are two high tides and two low tides, period between to tides is around six hours roughly. The tide period shifts approximately fifty minutes per day(see “ tide”)and evolves like a sinusoid curve. The difference of water level between high tide and low tide, called tidal range changes over the month in intensity(see “ tide”), this change is characterized by the tidal coefficient.
1)The tidal coefficient
This is the first number to copy before making a calculation of tide, without unity it evolves between 20 and 120. The lower it is the more it indicates a little tidal range and weak currents; the higher it is the more it tells us about a strong tidal range, so strong currents. This number is shown in tidal almanachs, or other books on the tides during a year. It is also used to calculate the strength of the currents. Under coefficient 70 it is heavy water( low tidal range)and above 70 we are in spring tide(rather strong).
2)Evolution between tides
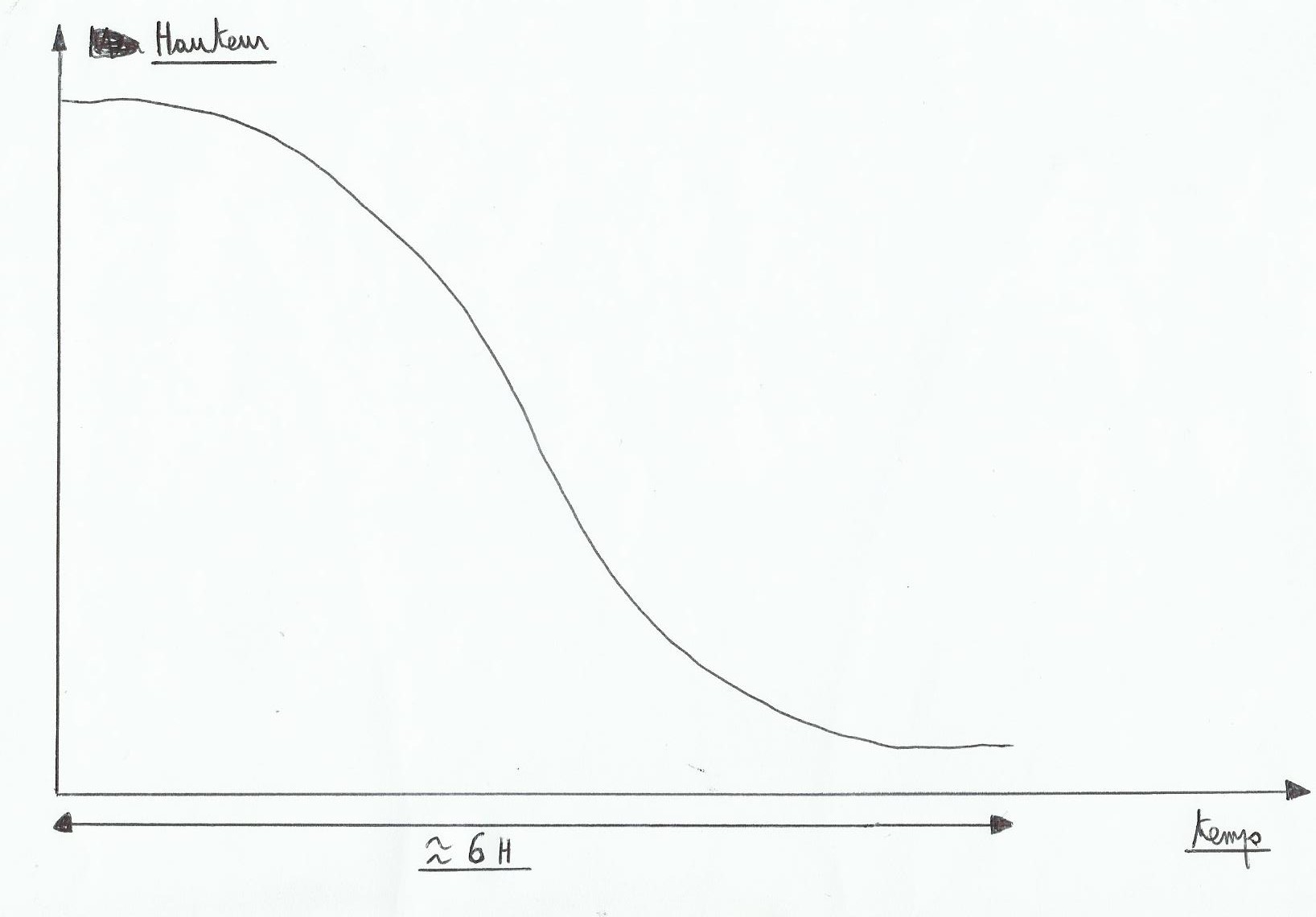
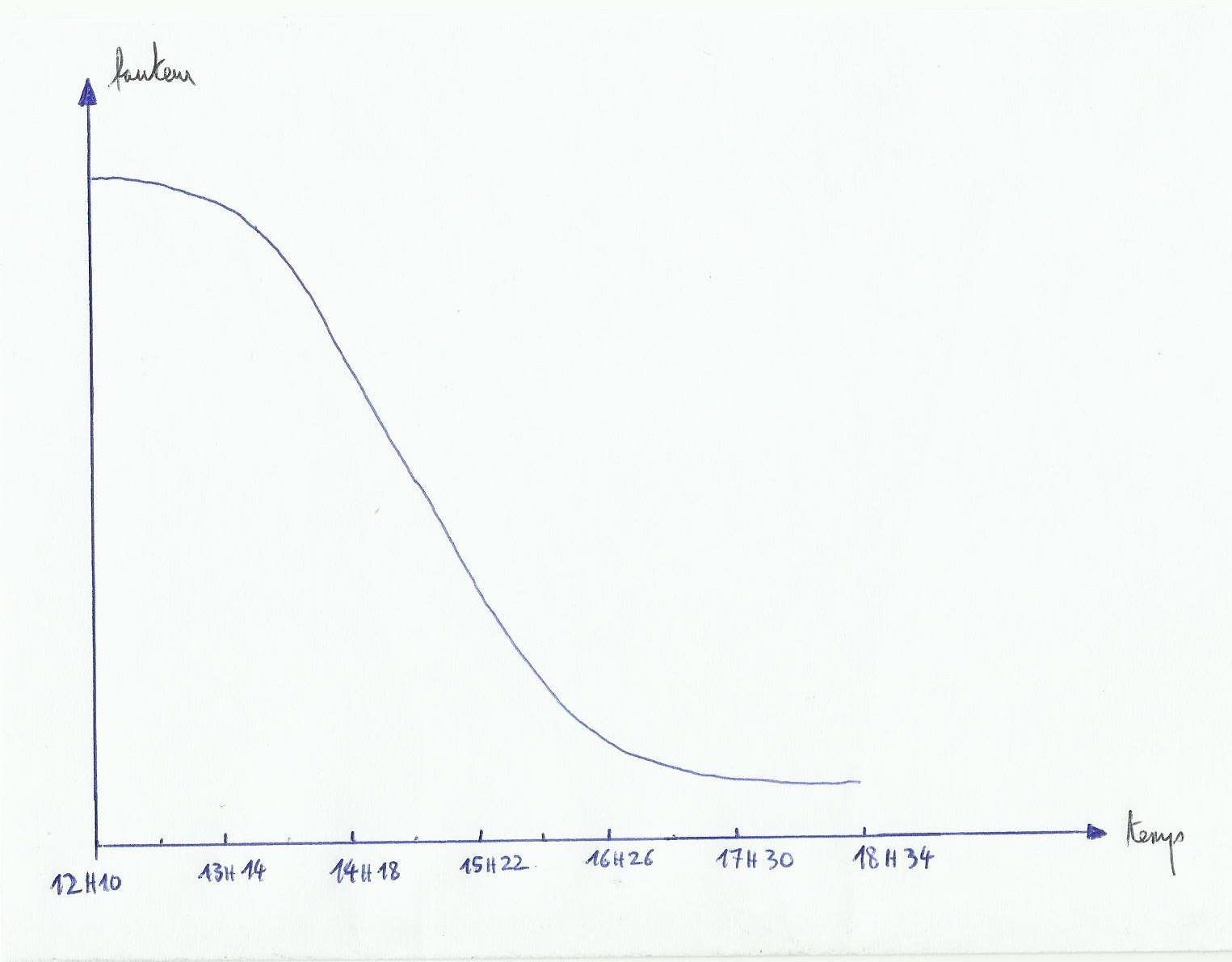
As we can see, tide does not change as a straight line. At the beginning it's falling slowly, accelerates quickly in the middle and ends slowly . We therefore realize that when there will be more water circulation, when there will be more current it will be mid-tide, or three hours before or three hours after a low or high sea level. Times when there will be less current will be close to slack(during high or low tide). The easiest way to find the height of water which is available at a time and a given location is to draw a graph, but problem: as we have seen before, tide does not change linearly, and draw freehand a sinusoidal curve is not very accurate!
3)To right a sinusoidal curve
This method makes us lose a bit of precision but it is simple. As noted above the time between low and high(or vice versa)is around 6 hours, it is the tide time and it is found simply by calculating the time between them(example, 6 hours 24 minutes). A tide hour, it is tidal time divided by six 6(So here 1 hour 4 minutes).
We accept the tidal evolution in that way; first we divide the tidal range by twelve 12. The first tide hour, there will be an increase or decrease of 1/12 of the tidal range, the second tide hour 2/12 th, and the third tide hour 3/12 th(where currents are the strongest). The fourth hour still 3/12 th, and after that the pace slows down at the fifth hour 2/12 th and finaly at the sixth tide hour 1/12 th. This is the rule of twelfths.
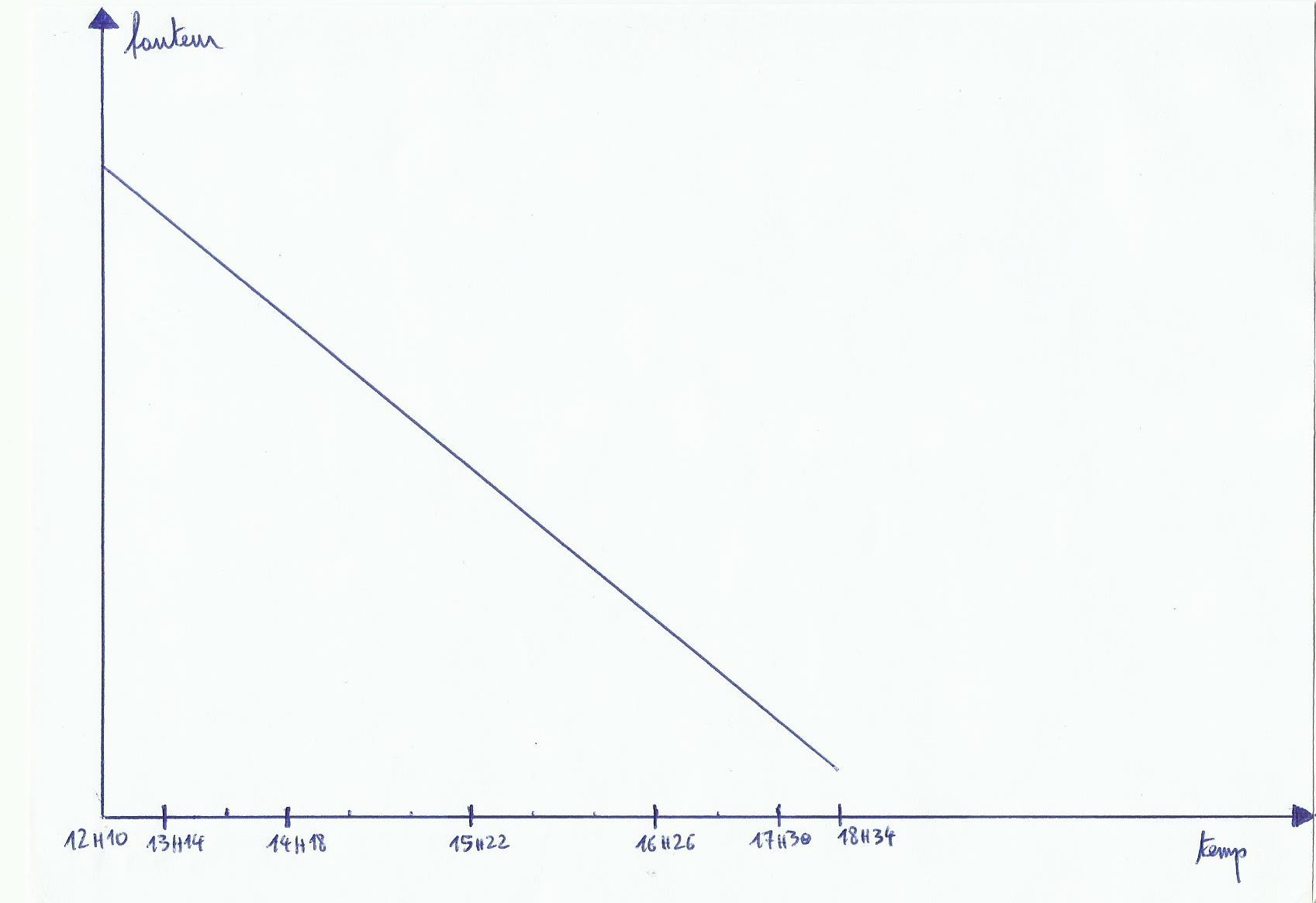
In this graph, abscissas provides tide hours. A tide time is here an hour and four minutes, at the end if you have done it right you'll find the slack time hour. This is marvellous but we are still bothered by our curve to draw! to draw a line instead of a curve we will change abscissas and in a same time we will keep in our mind the twefths rule:
The second tide hour will take twice as big as the first, the third tide hour twice as big as the first tide hour…we have a graphic that instantly gives us the height of tide in a given area.
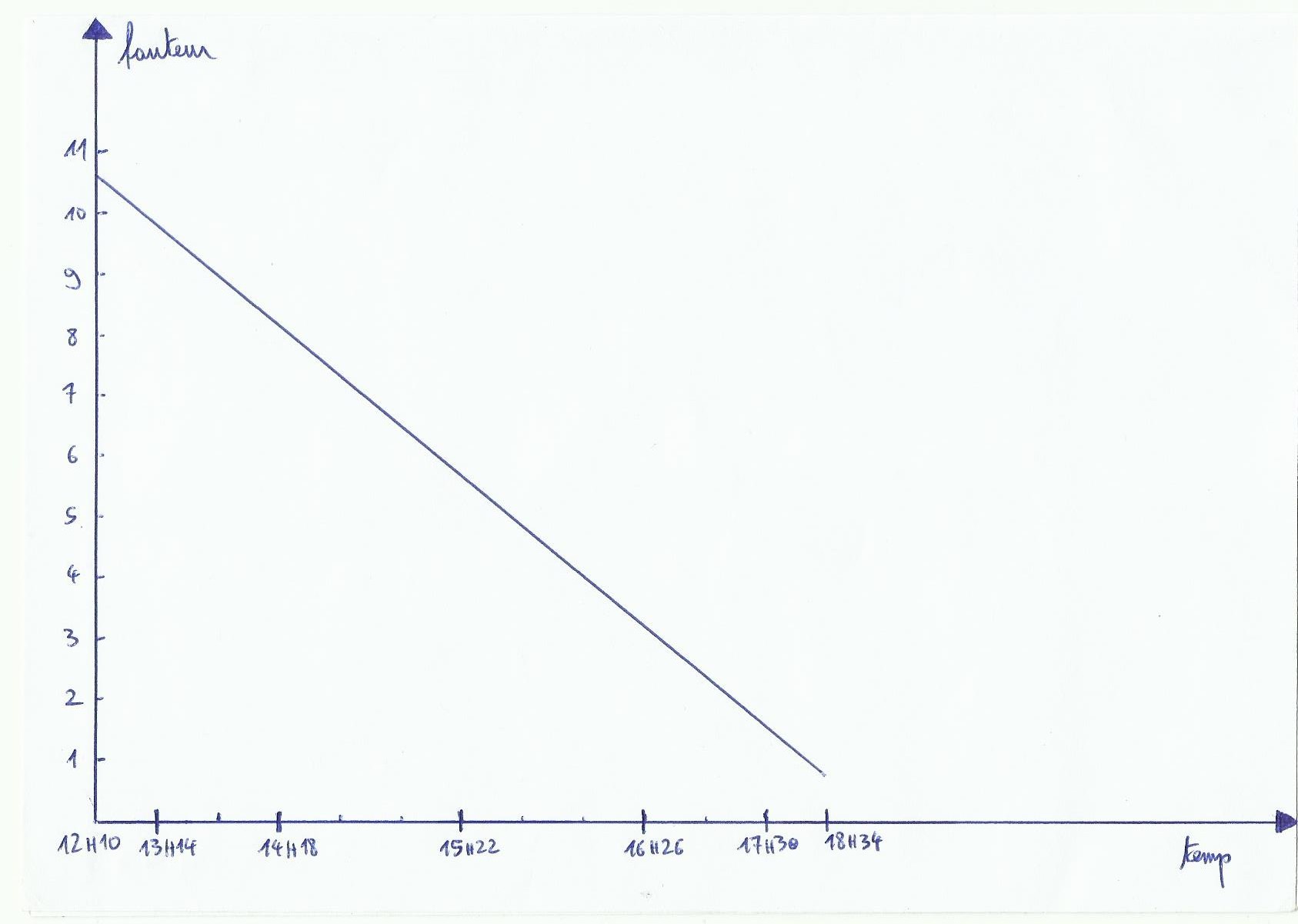
Only add this tide height to the depth indicated on the map to see the depth encountered at this time. Written depths on charts are those when the sea is at its lowest level(low tide coefficient 120). On green areas(foreshore, places covered or uncovered by the tide, drying heights)or on some points of the map there are numbers highlighted. To find the depth here we substract highlighted number to our tidal height. if the number is negative, it indicates the emerged height of the rock or something else at this place. Small example:
On the chart we notice a depth of 1 meter at a channel's entry, calculating tide above is about our navigation's area. Our boat has a draught of two meters. We keep a safety margin(under keel clearance)of one meter. We want to know if at 15 hours 20 there will be enough water to pass. According to the graph 15 h 20 we have 5 meters 70 for the tidal height, so in the channel's entrance we will actually have 6 meters 70 of depth at 15 h 20. Under the keel at this place there will be 4 meters 70 of space, well above the 1 meter of under keel clearance, it's cool you can go on without unpleasant surprise.
4)Corrections
In tidal's almaniachs there are reference ports, for example if you want to know the evolution of the water level at Brest, just take Brest timetables to draw your graph. However for Loctudy datas, you must first take the timetables and the tidal heights of its reference port which is Port-Tudy. height and time corrections change depending on whether you are in spring or neap tide; to be as accurate as possible it is better to use tidal neap corrections when the tidal coefficient is between 20 and 45, and spring tide corrections when the coefficient is between 95 and 120. Between 45 and 95, we work out the corrections average.
Always check the reference time data, if all data are in UT and one hour, Don't forget to add an hour in summer(usually from March to October).
5)Other things to consider
The atmospheric pressure affects the water level too. Average atmospheric pressure number is 1013 hpa(on the sea surface) 1013 hpa, for each hpa above this average number we subtract 1 cm(atmosphere pressure push water), and for each hpa under this number we add 1 cm.
The wind also affects the average sea level by its action. An sea wind(grown on the sea)will increase the average level(for a strong wind roughly 50 cm)and wind from the coast(offshore wind)will usually lower the level(50 cm less in strong winds). It is difficult to precisely quantify the change in height depending on the intensity of the wind. It explains in part why by strong gust of wind from the sea during high tide with high coefficient, there are overflowings in some ports.
Wind can also change the duration of ebb and flow, mid-tide time doesn't change. For example offshore wind decreases flow's duration and obviously increases ebb duration, and it's the contrary for sea wind.
Areas next to a river exit can undergo tide timetables modifications whether rain has poured recently, the rising tide just can be delayed.
6)Under keel clearance
I think the best is to take 1 meter to be quiet. However, when the sea is rough with large waves heights, you must increase according to wave height. For example if we meet two-meter waves, we increase the keel clearance by adding two meters.
All celestial bodies which are interacting each other via the gravitational attraction(see Newton's laws)create tidal forces, Moon exerts on the Earth a tidal force, but the other way is also true, even more substantial because this force has made the moon rotation period equal to its period of revolution(28 days roughly, that's why it's always the same face of the moon that is shown). Earth's attraction has finally “braked” the rotation of the Moon in some ways, So it is quite easy to guess the future: attraction's force of the Moon will also brake the rotation of the Earth, gradually lengthening day's length(the earth wins 1 second of delay every 600 centuries).
1)Quadrature and Syzygie
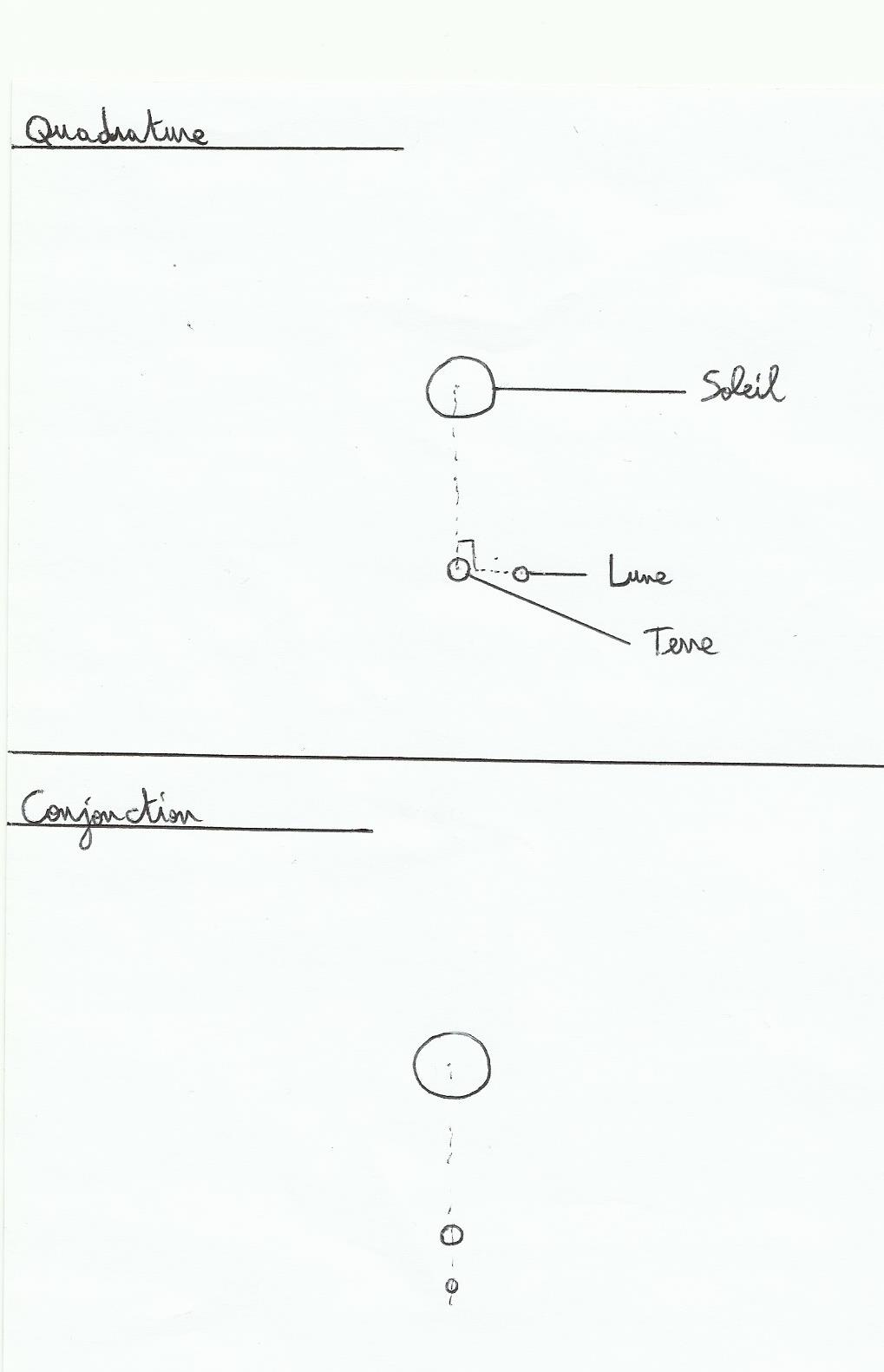
The celestial bodies that have significant gravitational influence on Earth are the Sun and the Moon, so both come into the game in the tides. The Sun represents one third of the total tide's strengh and moon two thirds remaining. Their effects are added when they are in line with the Earth(conjunction or Syzygie)and interfered when they are in quadrature(they draw an angle of 90 ° with the Earth).
Basically when there is conjunction, when we are on a new moon or full moon tides are strong, and when we are in quadrature(first or last quarter)tides are weak.
The sun's zenith is located in equatorial area, and the Moon has an orbit close to the ecliptic(5° of the ecliptic), we deduce that this force is applied mainly on the equatorial water masses. Offshore the water displacement is small, but it becomes important on the coast with a weaker depth.
Notice: the equinoctial tides are mainly due to the Sun at this time because it exercises on water equatorial masses a maximum force.
Earth turn on itself in 24 hours, So there is about two high and low tides at a point of the globe on the same day. The moon takes 28 days to turn around the Earth in the anti-clockwise(like Earth)therefore at a point of origin the earth tide shifts of 1/28 th Day, 52 minutes(between two low tides for example there will be approximately 12 hours 26 minutes).
2)Effects
The effects caused by this phenomenon can be felt near the coast. The more water is low in depth, the more water level will change, the more we are close to the equatorial zone the more its influence is felt, the more the coast tightens, the more it will change the water level . The tide phenomenon is almost nonexistent in enclosed seas because these water masses are less important in quantity.
Examples: the very weak tide in the Mediterranean sea, in the contrary very strong in the Channel due to the short depth of it(70 meters max )compared with Atlantic, to the funnel shape of the Channel and angular coast between Brittany and the Hague cape that “traps” Water, and furthermore Coriolis influence.
Yes..., this is supposed to be the Channel…Like the wind, currents are deflected to the right in the Northern Hemisphere, the tidal range is the difference in water level between high tide and low tide.
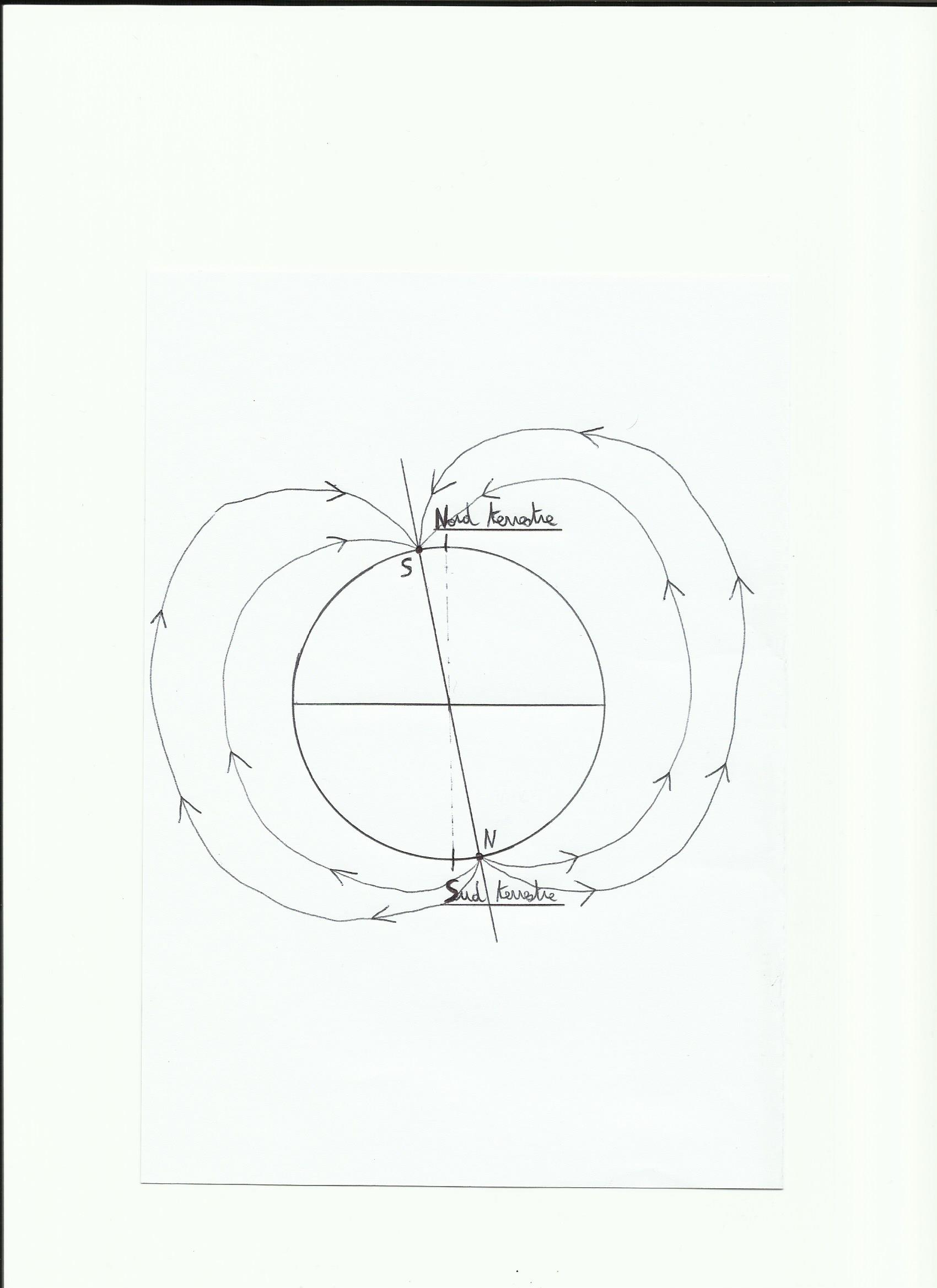
Like almost all celestial bodies the earth develops a magnetic field due to its rotation on itself. This field depends on the amount of iron present in the core, iron masses present on the surface and rotation speed(neutron stars, pulsars have a very strong magnetic field because their speed is very important). This magnetic field is materialized with the presence of the magnetosphere, this is a field line which is running around the earth and protects it from sun particles.
The magnetosphere is self-sustaining like a dynamo effect:
.Earth's magnetic field acts as a magnet, an inductor(equivalent of the electromagnet in a car alternator).
.The mass of liquid iron in rotation in the core acts as the coil of conductive copper, so the armature(it is the stator in an alternator car).
The Earth's magnetic field is organized as a conventional dipole magnet with a north and south pole, the field lines emerge from the north pole and enter the south pole; So in fact what is currently shown as the North Pole by the compass is actually the South Magnetic Pole.
1)Earth's magnetic field
Important fact for navigators, the magnetic poles line is shifted from the geographic poles line currently about 8 °.
Magnetic North is located approximately 82 ° N latitude and 11 ° W longitude(corresponds to the northern Canadian coast). Magnetic South is at 65 ° S latitude and 138 ° E longitude roughly.
This magnetic poles line is variable in time, and is able to travel the globe to reverse on a period(there may be up to 5 reversal of poles on 1 million years, an inversion lasts about 15000 years).
2)noticeable effects
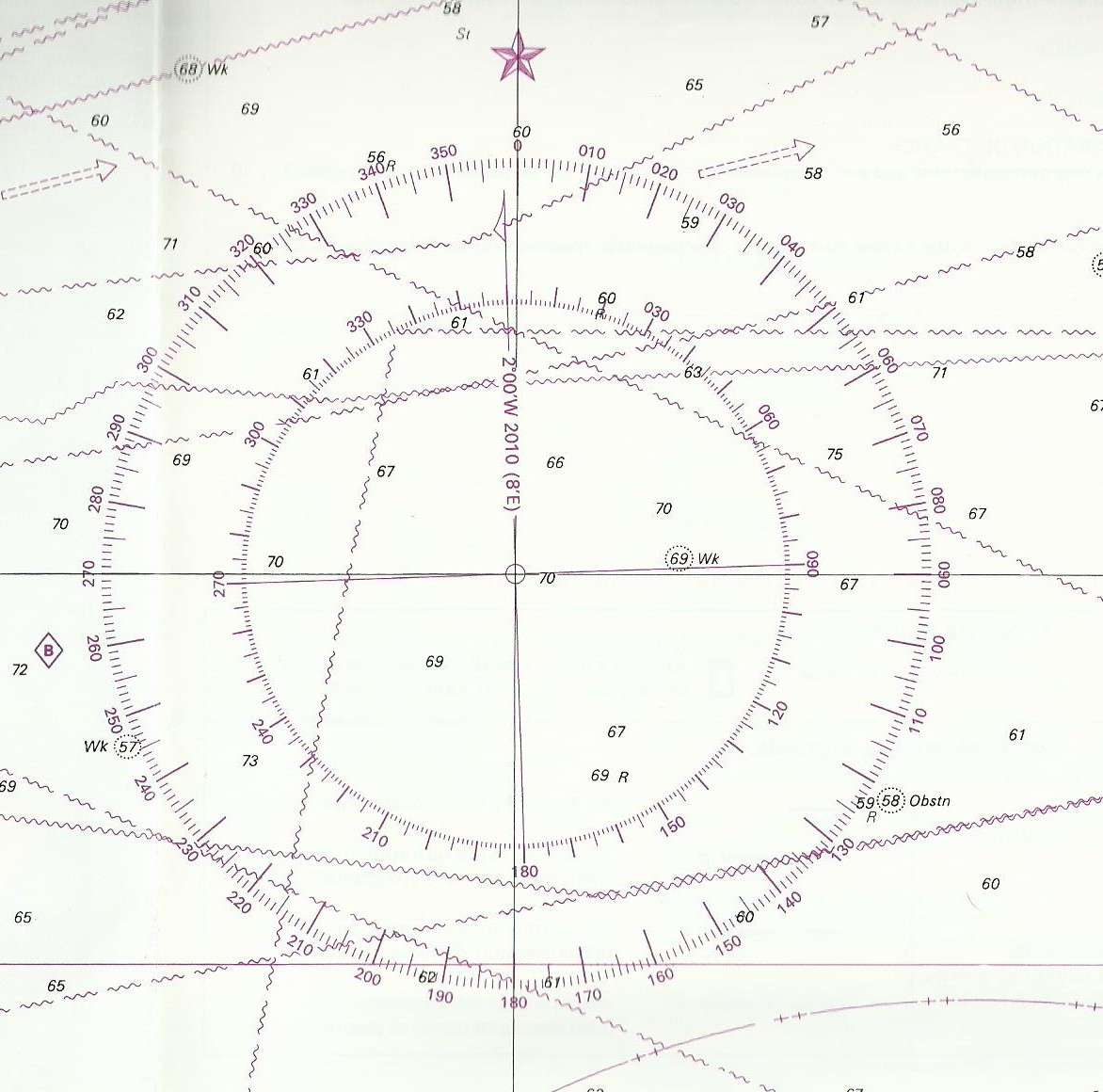
On charts we meet this kind of thing:
This tool simply points out the difference between true north which is the geographic North (where meridians intersect), and magnetic north. In the circle's center you can see a vertical inscription: “2°00W 2010(8'E)”. This means that in 2010 Magnetic North was(in the chart's area)shifted 2 ° W to True North. “8'E” means that every year the magnetic north moves to east 8 minutes, So every year the magnetic north is closer to the True North. So in 2014, known 1 ° = 60 minutes, this difference will be 8 * 4 = 32′ in fact about 1/2 degree of difference from 2010. In 2014 North Magnetic North difference true / will be 1 ° 28'W. This difference is the Declination.
However, otherwise it would be too simple, we must add an another parameter, the possible magnetic interferences met on a boat. The presence of metals or electrical circuits near the steering compass or hand bearing compass can affect him. In fact the magnetic north is not always equivalent to the North compass( read on the instrument). This difference is called the deviation. On a boat we materialize it through a deviation curve which shows the differences between the magnetic heading that we should find and the compass heading read. We can draw this curve at the port by turning the boat in all directions and writting the differences with an another compass on the quay, or with the help of a gps during a navigation, or using the steering ranges too.
Finally, between true heading(that made by the boat)and the compass heading indicated by the instrument, we must take into account deviation and Declination. We can combine them in the variation W. W(variation)=D(Declination)+d(deviation)
The true heading drawn on the chart is the compass heading combined with variation. On the contrary, when we start from the chart, to give a right direction to the helmsman this variation is substracted. Cv(true heading)=Cc(compass heading)+ W.
Declination as the deviation is negative when it is West and positive when it's East.
The magnetic field is also on the origin of borealis auroras at the poles(the solar wind particles act with atmosphere's atoms, creating luminous phenomena)and magnetic storms(sudden changes in the Earth's magnetic field during solar storms).
Notice: the deviation is very important for metal boats. In general for coastal navigation trips it can be underrated, However, offshore it is essential for the dead reckoning as Declination.



















{kind=link}