Assez insatisfait par mon programme précédent sur le point d’étoiles, j’en ai donc fait un autre plus précis. Il comporte un menu de sélection avec différentes étoiles, classées par constellation. Pour le mettre au point j’ai repris le master en astrophysique déniché sur internet (http://userpages.irap.omp.eu/jleborgne/astrometrie.pdf), sauf que cette fois j’ai pris en considération les corrections au complet (précession, nutation, aberration de Bradley, parallaxe, réfraction, dépression de l’horizon). Pour ajouter une barre de menu j’ai pompé sur la page web suivante : https://openclassrooms.com/courses/creation-de-barres-de-menus-sur-ti89-92-et-v200.
Si vous voulez rajouter des étoiles ou des constellations supplémentaires dans la barre des menus c’est facile il suffit de suivre ce tuto très utile. Pour voir si ça fonctionne j’ai trouvé un pdf sur le net appelé « exercices astro 2016-navigation astronomique ». ça fonctionne pour l’exercice mais il faudra le tester en réel une ou deux fois dans de bonnes conditions à la prochaine navigation pour voir.
Voilà le programme, en espérant ne pas avoir fait de fautes d’étourderies en le recopiant (je me suis relu plusieurs fois ça devrait aller !) :
Si ça ne fonctionne pas correctement, n’hésitez pas à me laissez un petit message!
PS:Un visiteur du site a aimablement corrigé deux boulettes sur le programme que j’ai publié au-dessus:
– l’angle horaire local (variable ahl) : mod(tslo+xxx-lone,360)
– tslo (variable tslo) : il faut remplacer gg/36525 par ((gg-h/24-m/1440-s/86400)-2451545)/36525
Par rapport aux étoiles, c’est quand même plus intéressant de faire le point avec le soleil; la journée en général l’horizon est bien dégagé et facilement perceptible, rendant l’usage du sextant plus commode et précis dans ses résultats, avec une amplitude de temps d’usage plus grande . Comme pour le programme fait avec les étoiles, on va d’abord chercher à « transformer » toutes les données de notre temps de mesure (heures, minutes, secondes, mois, années) en un seul nombre. Ce dernier permettra ensuite le reste des calculs qui ne sont rien d’autre que des fonctions dépendant du facteur temps. Pour ce début de programme on aurait donc pu utiliser le même que pour celui avec les étoiles, mais pour rigoler, cette fois on va tenir compte du calendrier Grégorien, allez hop à la benne le calendrier Julien!
1) Première partie: calculer le facteur temps selon le calendrier Grégorien
Rappel: dans le calendrier Julien l’année moyenne dure 365.25 jours, donc une année bissextile a lieu tout les 4 ans (2008, 2012, 2016, 2020…). Sur le calendrier cela se traduit par un jour supplémentaire en février tout les 4 ans (29 jours au lieu de 28).
Pour résumer, afin d’avoir une année de calendrier avec une durée plus proche de la réalité, soit la durée d’une année tropique (à peu prêt 365,2422 jours), le procédé de calcul a été amélioré afin de réduire légèrement dans la durée la grandeur d’une année Julienne. En effet dans le calendrier Grégorien une année moyenne dure 365,2425 jours. Pour en arriver là, on garde les caractéristiques du calendrier Julien, mais à chaque année séculaire on ne la considère comme bissextile que si elle est divisible par 400. Pour notre programmation on va donc considérer une année comme bissextile si elle a eu lieu 4 ans après une autre année bissextile. Ensuite pour les années séculaires donc divisibles par 100 on fait le tri et on les acceptera comme bissextiles si elles sont également divisibles par 400. Par exemple d’après le calendrier Grégorien 2000 et 2400 sont bissextiles, mais 2500 et 2600 ne sont pas bissextiles.
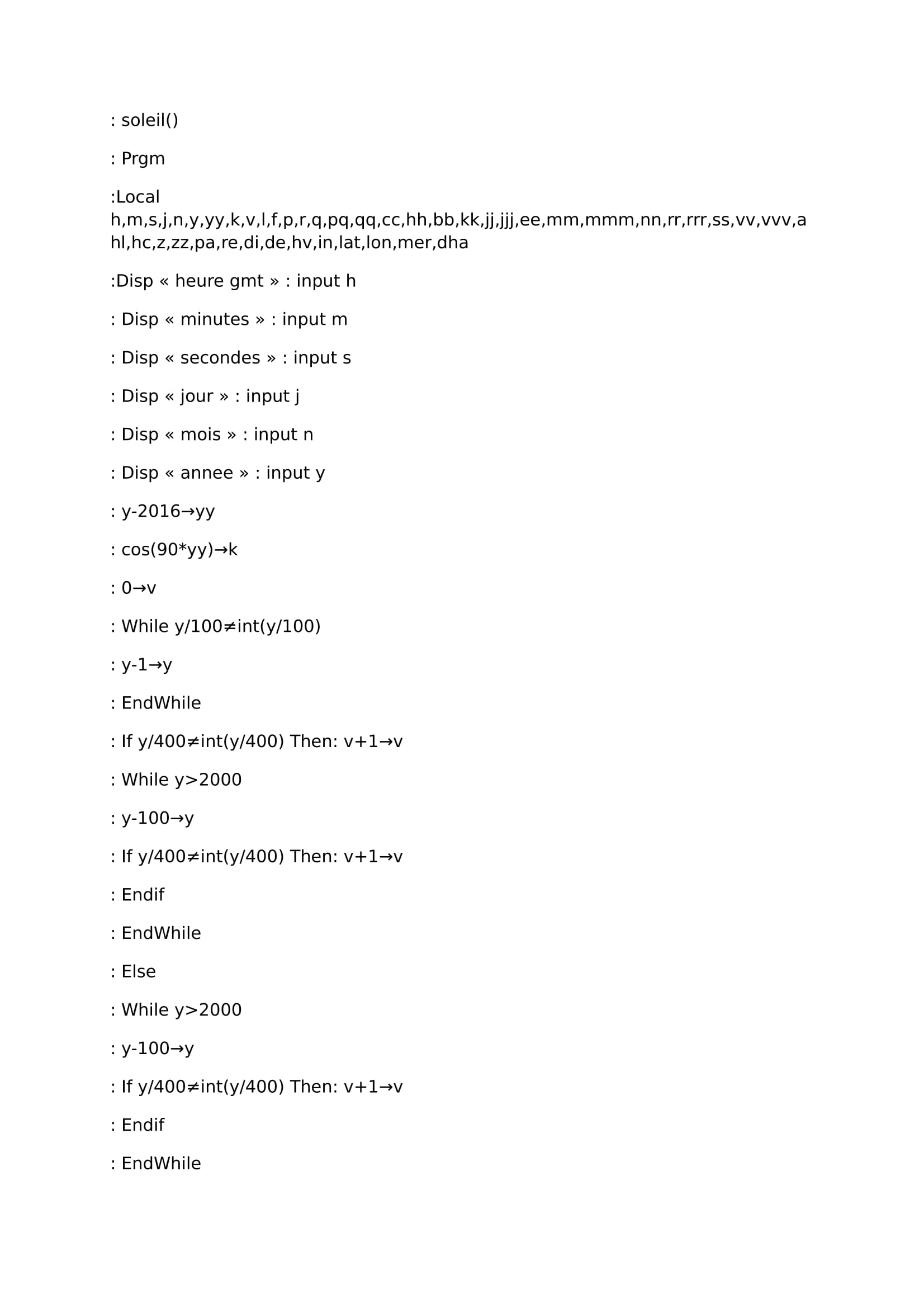
Voilà ce que ça donne pour notre début de programme:
On s’aide de la boucle « while » et de la fonction int(). La boucle « while » demande au programme d’effectuer un calcul temps qu’une ou plusieurs conditions n’ont pas été atteintes, et la fonction « int() » ne garde que la partie entière d’un nombre, par exemple int(2.7)=2. Le nombre en fin de page 2457388.5 correspond au jour julien le 01/01/2016 à 00h00.
2) Deuxième partie: calculer à partir du facteur temps la déclinaison et l’angle horaire du soleil.
Comme on l’a vu dans « programmer une ti89 pour la navigation », il existe différentes façon de calculer ces deux paramètres, plus ou moins précises sur une durée plus ou moins longue, avec également plus ou moins de difficultés…Pour avoir des résultats très précis sur une durée très longue, cela demande énormément de paramètres à prendre en conséquence, en plus les astres se comportent de façon chaotique sur des périodes très longues…On va donc pas trop s’emmerder avec tout ça et plutôt fixer des limites selon nos besoins, c’est à dire un programme pertinent à l’échelle d’une vie et assez précis pour faire un point potable en navigation et pas trop alambiqué à programmer!
a) L’angle horaire:
Si on considère les choses de la façon la plus simple, on part du principe que la terre tourne sur elle-même en 24 heures, donnant l’illusion d’un mouvement du soleil autour de la terre se déplaçant à la vitesse de 360°/24H=15° par heure, avec le passage du soleil au méridien de greenwich à 12H UTC. En partant de ce postulat il suffirait d’écrire une formule comme AHG=15*(l*24) pour calculer l’angle horaire à greenwich(AHG), avec comme donnée origine en facteur temps un midi au méridien de greenwich. Pour déterminer notre angle horaire local (AHL), il suffirait simplement de soustraire à AHG notre longitude estimée(G).
Pourtant c’est insuffisant, avec ce fonctionnement simple on se retrouve avec des écarts de plus de 3 degrés par rapport aux véritables données! En fait le mouvement apparent du soleil par rapport à la terre n’a pas une vitesse constante à cause tout d’abord de la forme elliptique de l’orbite terrestre (voir la première et deuxième loi de Kepler), et aussi à cause de l’axe de rotation de la terre incliné sur son orbite. Heureusement, les écarts se répètent de façon quasi identique d’années en années, permettant assez facilement de calculer les bonnes données à chaque fois. Pour cela on va utiliser ce qu’on appelle l’équation du temps. Comme le dit si bien notre copain wikipépé cette équation correspond à un instant donné à la différence entre le temps solaire moyen et le temps solaire vrai. Le temps solaire moyen c’est le calcul écris dans le paragraphe au-dessus (le soleil se déplace à vitesse constante) et le temps solaire vrai va être calculé grâce aux équations écrites par wikipépé (influence de l’ellipticité de l’orbite terrestre et influence de l’obliquité de la terre). Conformément au début de notre programme ça donne maintenant ça:
La fonction mod() sert ici à obtenir un résultat toujours compris entre 0 et 360 degrés(cette fonction fournit le reste d’une division euclidienne selon un dividende et un diviseur choisit), sinon on se retrouverait avec des angles énormes qui n’ont pas de sens. On pourrait également utiliser la boucle « for » pour ça mais la calculatrice mettrait plus de temps à calculer. Il y a 180 après mod() car le programme débute à minuit le 1/1/2016 (voir première partie du prog), donc à cette heure l’angle horaire moyen du soleil avec greenwich fait 180 degrés(si le prog avait débuté à midi, on aurait pas rajouté 180 mais rien du tout).
Pour les équations du temps, les coefficients employés sont facilement identifiables:
357.5291=anomalie moyenne le 01/01/2000 à 12h.
0.98560028=c’est la vitesse angulaire de rotation moyenne de la terre autour du soleil entre le passage de 2 périhélies, donc il s’agit de 360 divisé par l’année anomalistique.
2451545=c’est le jour julien du 01/01/2000 à 12h.
1.9148; 0.02; 0.0003=Il s’agit simplement d’un changement des coefficients de l’équation du centre en degrés(il suffit de multiplier les coeff d’origine par 180/π). L’obtention de l’équation du centre est expliquée par wiki.
280.4665=C’est la valeur de la longitude écliptique le 01/01/2000 à 12h.
0.98564736=C’est la vitesse angulaire moyenne de rotation de la terre autour du soleil sur une année tropique, donc on trouve cette valeur en calculant 360/365.2421898.
-2.46569; 0.053; 0.0014=comme pour l’équation du centre il s’agit d’un passage des coefficients de l’équation en degrés.
b) La déclinaison
Comme on l’a vu dans « programmer une ti89 pour la navigation », il existe plein de façons différentes d’obtenir la déclinaison du soleil; en utilisant des méthodes avec plus ou moins de paramètres, donc plus ou moins de précision et aussi plus ou moins de difficultés à programmer l’ensemble… pas simple. On va donc éliminer des données. On ne tiendra pas compte de l’influence des planètes et de la Lune du système solaire sur nos calculs, seulement des lois de kepler appliquées au système terre/soleil, se sera déjà pas trop mal.
La formule la plus simple pour avoir la déclinaison est celle qui utilise la structure d’une fonction périodique simple (sinus, cosinus) comme celle de Desmond Fletcher:
D=23.45*sin(2π/365(284+j)) avec j jours juliens. Ici 23.45 correspond à l’amplitude de la fonction sinus, donc à la valeur absolue maximale que peut atteindre la déclinaison (aux solstices). 2π/365 correspond à la période de la fonction sinus, ici elle va donc se répéter tout les 365 jours. 284 est un déphasage de la fonction. Cette formule ne tient pas compte de l’ellipticité de l’orbite terrestre et considère son mouvement équivalent à la trajectoire d’un cercle. C’est la méthode la plus simple mais aussi la moins précise.
Pour la déclinaison une autre façon de faire consisterai à écrire une fonction périodique mais par morceaux, chaque morceau correspondant à une saison, donc une fonction en 4 parties (voir « programmer une ti89 pour la navigation »). Cette méthode fonctionne bien, est facile à faire car il suffit de connaitre les dates des solstices et des équinoxes pour l’année à venir, cependant son point faible est qu’elle ne fonctionne que pour une année. En effet d’une année à l’autre les heures de passage aux équinoxes et aux solstices changent en suivant une valeur moyenne, mais en réalité il y a des écarts de quelques minutes, et à la fin le cumul de ses différences provoque…De plus grosses différences!
Sur internet il est facile de trouver des formules pour la déclinaison données par l’IMCCE, fonctionnant à plus ou moins long terme. On peut aussi en déduire une à partir de l’équation du temps car on sait que:
sin(déclinaison)=sin(obliquité de l’écliptique)*sin(longitude vraie du soleil).
En effet, pour le prouver c’est un peu la même démonstration que celle employée avec le triangle rectangle sphérique (permet de trouver les formules pour l’azimut et la hauteur calculée d’un astre), comme j’ai un peu la flemme de la faire pour les curieux c’est très bien expliqué sur la page web suivante : https://sites.google.com/site/astronomievouteceleste/4—mouvement-du-soleil
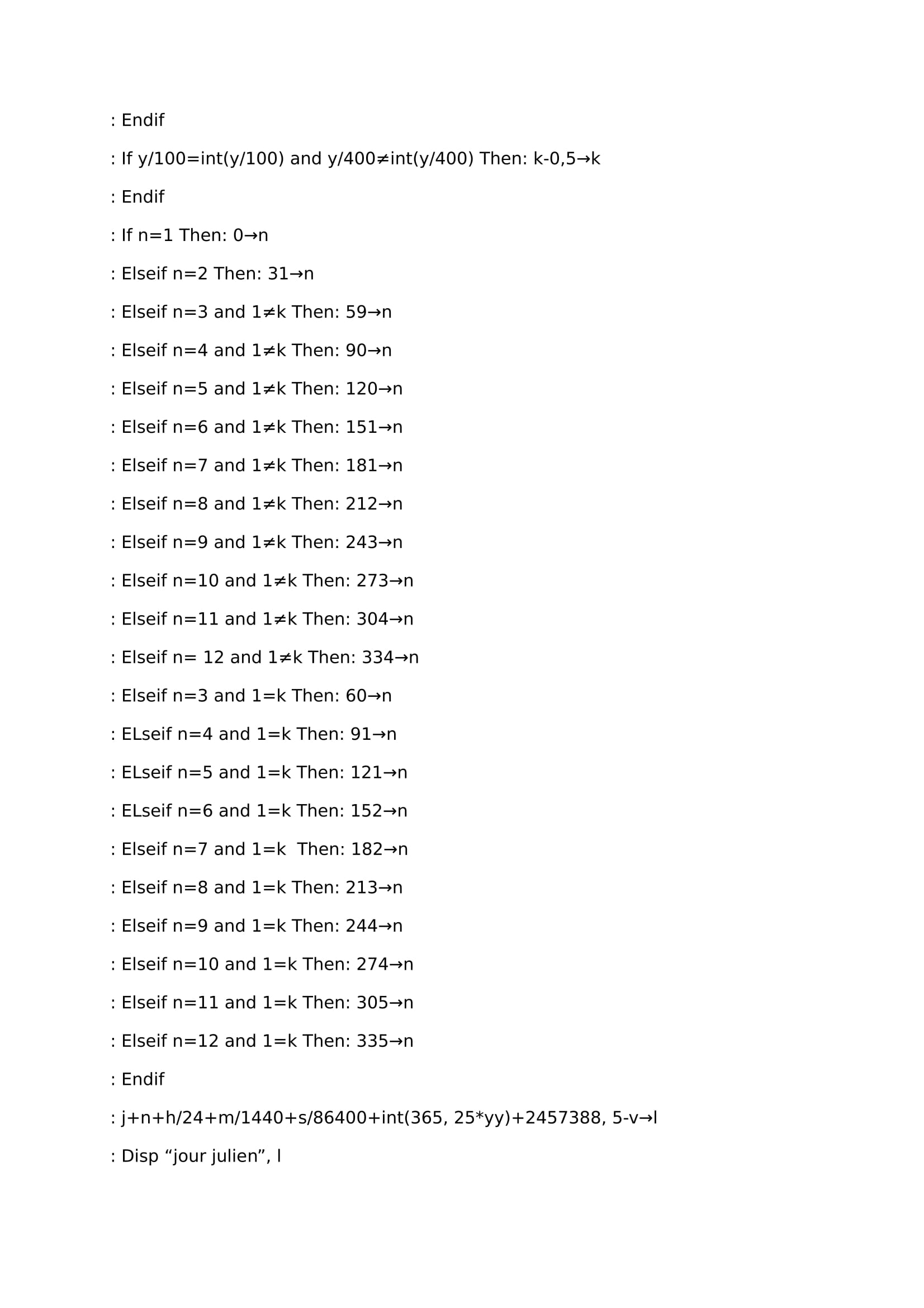
à partir de tout ça on peut en déduire la formule de la déclinaison à écrire à la suite du début de notre programme:
Donc pour la déclinaison, 3 lignes de programme seulement suffisent quand on connait AHG. Avant de poursuivre notre prog on va vérifier l’efficacité de tout ça grâce au site de l’IMCCE, histoire de voir si c’est suffisamment précis notre histoire.
Test
En prenant 10 valeurs différentes on obtient ça:
le 15/12/2019 à 14h22 : -23°16’13.91 »/36°44’27.88 »→-23°16’/17h31
le 2/11/2043 à 2h : -14°40’9.90 »/214°6’50.43 »→-14°40’/14h29
le 28/2/2055 à 16h47: -7°47’20 »/68°38’28.54 »→-7°47’/22h46
le 12/5/2128 à 5h06: 18°28’20.7 »/257°22’25.4 »→18°13’/3h18
le 7/07/2184 à 21h12: 22°17’33.11 »/136°34’51.76 »→22°23’/7h12
le 18/10/2079 à 23h10: -9°56’58.8 »/171°15’1.75 »→-9°57/13h35
le 13/6/2046 à 12h11: 23°14’12.71 »/2°42’14.74 »→23°14’/5h28
le 6/09/2033 à 18h55: 6°6’8.13 »/104°12’36.45 »→6°6’/11h03
le 1/03/2085 à 4h22: -7°19’47.17 »/242°27’31.56 »→-7°20’/22h51
le 19/02/2074 à 3h18: -11°10’21.23 »/226°4’8.9 »→-11°10’/22h12
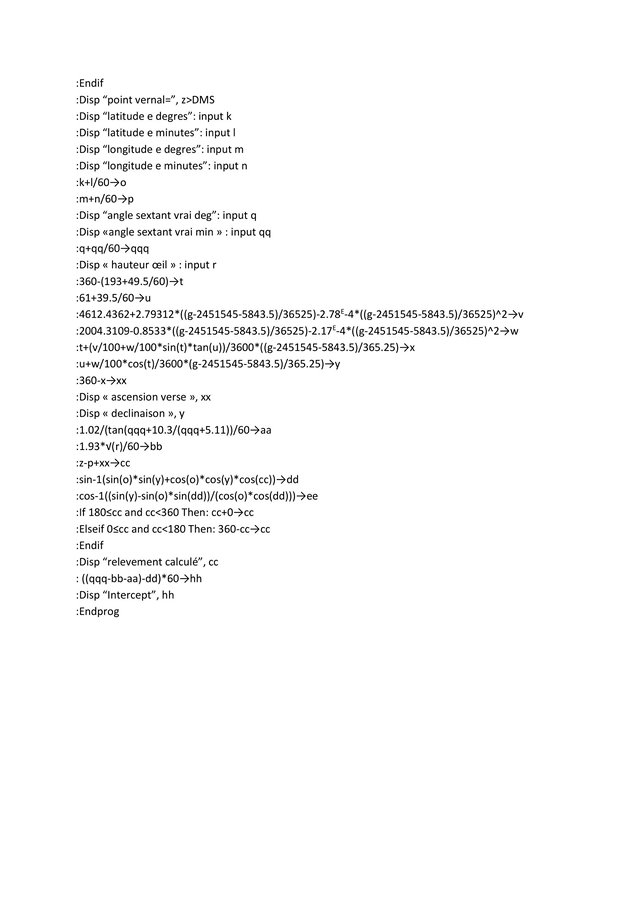
à gauche c’est les résultats du prog en déclinaison et en angle horaire à greenwich, et à droite c’est ceux de la page web « calcul des éphémérides » de l’IMCCE en déclinaison et en ascension droite. A première vue c’est pas mal, on commence à perdre en précision de quelques minutes d’angle après 2080 sur la déclinaison donc d’ici là on a le temps… On sait que l’ascension droite est l’angle entre le méridien du point vernal et celui d’un astre, mesuré vers l’est et exprimé en heures, et que c’est le complément à 360° de l’ascension verse. Or on a déjà trouvé la formule pour calculer le méridien du point vernal dans le programme pour se positionner avec les étoiles qui est la suivante :
100+5.5/60+(l-2451545-5843.5)*(360/365.2421898+360)-0.0524*16/(24*3600*36525)-0.0524*(l-2451545-5843.5)/(24*3600*36525)=angle point vernal. Donc en le calant à la suite dans notre prog ça donne:
En refaisant le comparatif avec les ascensions droites trouvées sur l’IMCCE c’est pas mal. On peut dire que jusqu’à environ 2080 c’est précis, après un peu moins. On peut considérer que la partie éphémérides est OK pour la navigation. On va pouvoir passer à la suite c’est cool. Pour cette partie on aurait pu peut-être faire plus précis en intégrant certains des paramètres fixes utilisés en variables comme l’excentricité, la durée de l’année tropique et anomalistique, et l’angle d’inclinaison de la terre sur l’écliptique. Cependant pour nos besoins se sera suffisant je pense.
3) Calcul de l’intercept et de l’azimut vrai
Maintenant que l’on a la déclinaison et l’angle horaire du soleil calculé à l’instant de la mesure, il va nous rester à définir la hauteur calculée (formule trigonométrique comme pour les étoiles), la hauteur vraie (c’est la hauteur instrumentale à partir de laquelle on va ajouter des corrections), et donc l’intercept et l’azimut vrai du soleil.
Les corrections à ajouter à la hauteur mesurée:
– La réfraction de la lumière (dépend de la hauteur de l’astre sur l’horizon).
– La parallaxe (dépend du rayon de la Terre, la distance Terre/Soleil et la hauteur de l’astre sur l’horizon).
– Le demi-diamètre du Soleil (environ 16 minutes).
– La hauteur de l’oeil d’observation par rapport au niveau de la mer.
– La collimation.
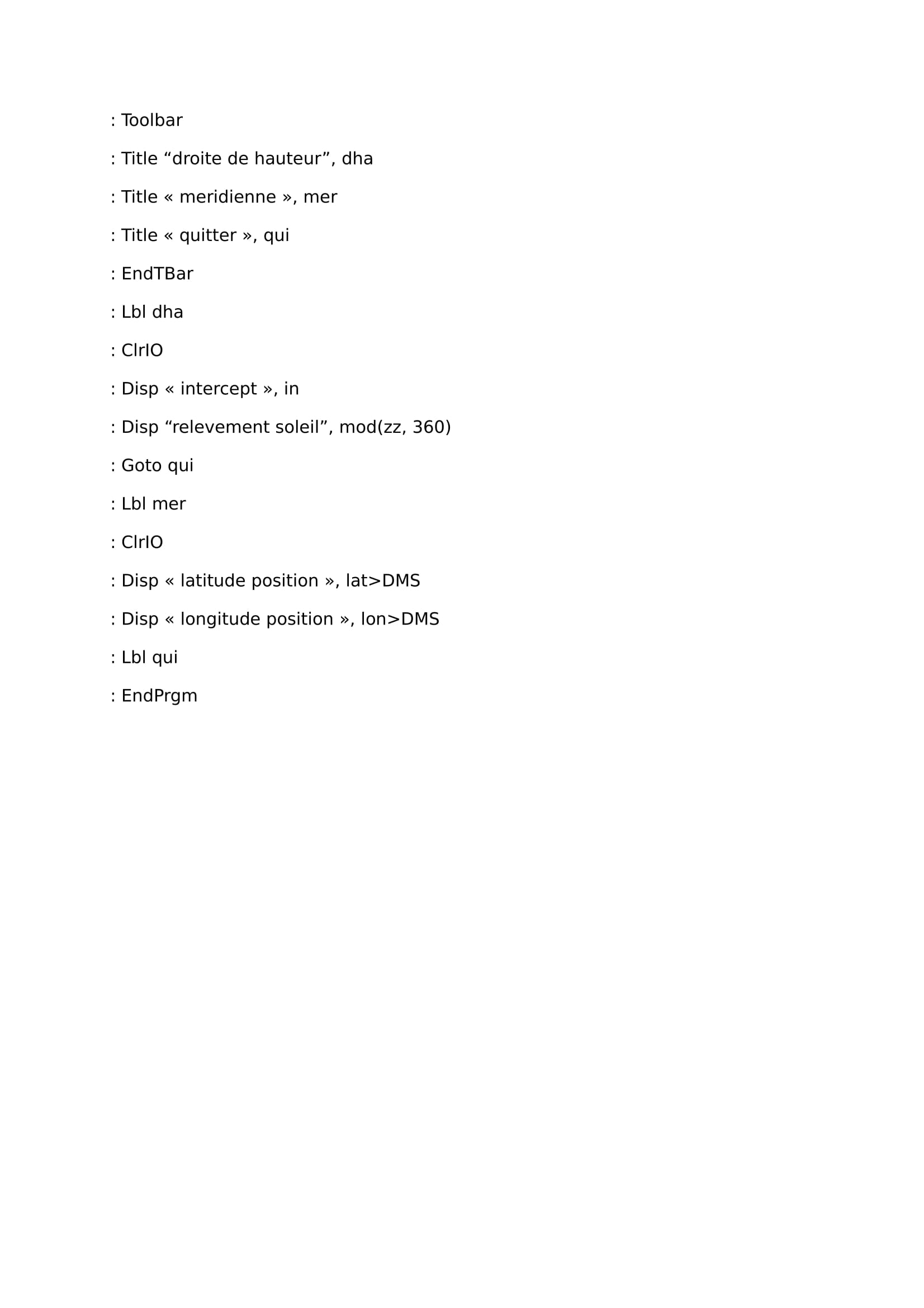
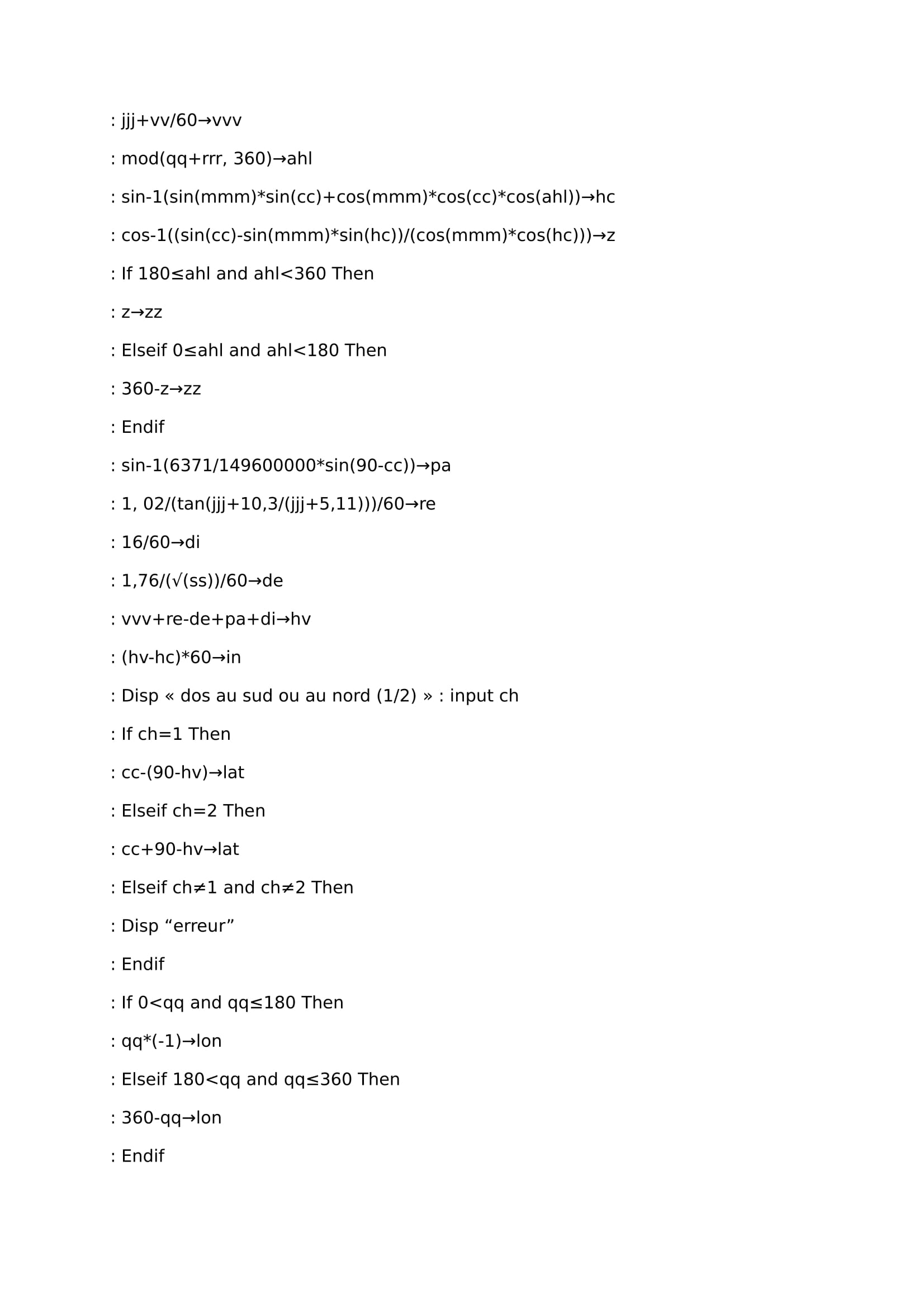
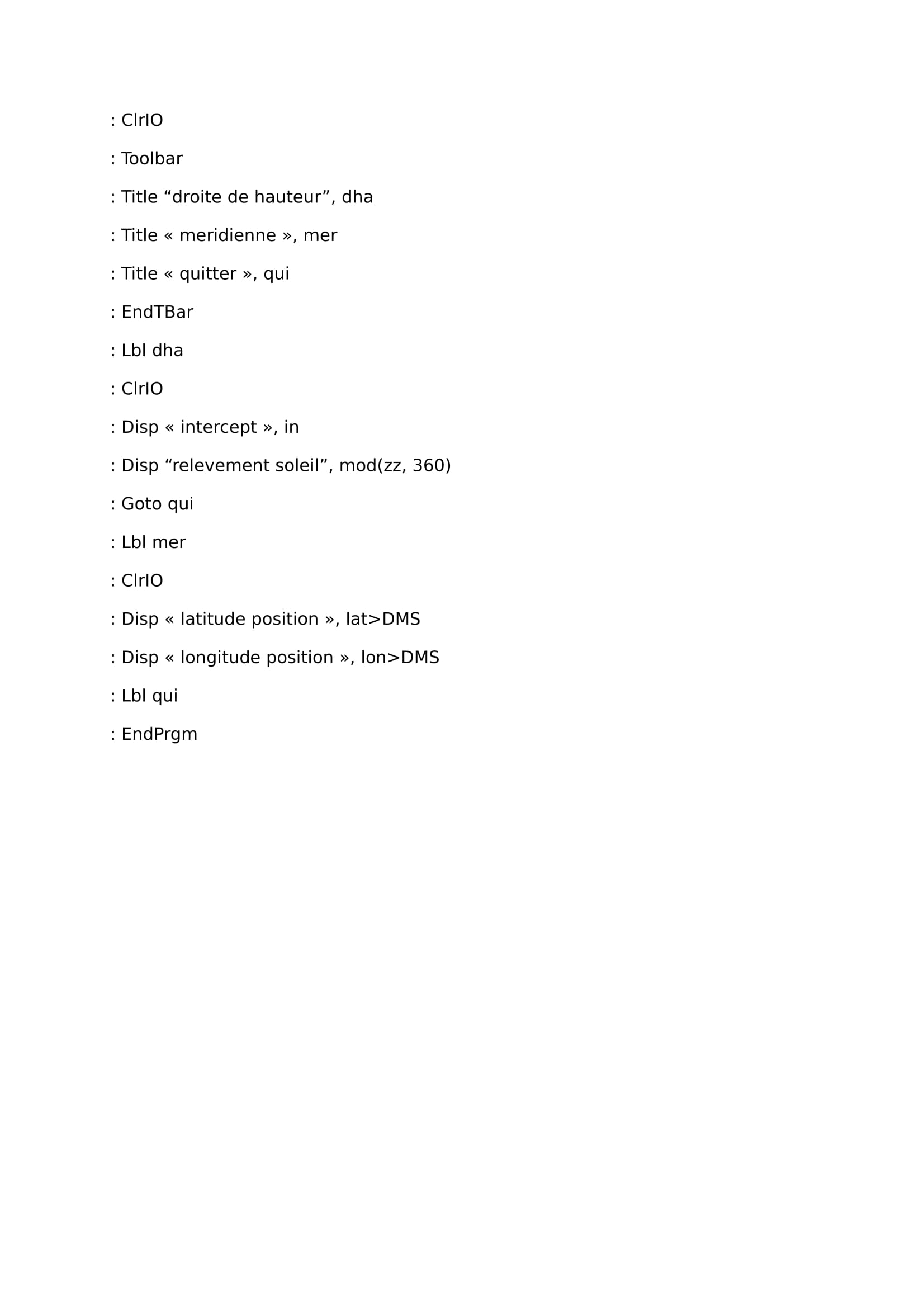
Le programme provisoire donne ça:
Ce programme permet aussi de calculer des méridiennes, il suffit de taper 1 ou 2 si vous êtes dos au sud ou au nord quand vous observez le Soleil.
Attention: test !
J’ai vérifié son fonctionnement avec les pages web navastro (« navastro.free.fr/meridienne.htm » pour faire une méridienne et « navastro.free.fr/exos/exercices.htm » pour les droites de hauteurs). Les résultats diffèrent un peu mais ça reste assez potable et crédible. Un peu déçu, je creuse et remarque une erreur dans le programme du dessus; à la ligne de calcul de l’angle horaire local (ahl) au lieu d’avoir:
: mod(qq-rrr, 360)→ahl en fait c’est :mod(qq+rrr,360)→ahl
Et pour l’intercept au lieu d’avoir:
: hv-hc→in en fait c’est (hv-hc)*60→in
Le programme final qui fonctionne donne donc ça:
En faisant ces modifs, ô miracle cette fois on trouve quasiment les mêmes résultats que navastro! Pfiou bon laissons le capitaine Haddock conclure avec philosophie…
Le point d’étoile fonctionne un peu comme un point à trois relèvements avec des amers, sauf que dans ce cas précis les relèvements sont remplacés par des droites de hauteur faites sur des étoiles. Pour que le point d’étoile soit précis il faut si possible utiliser des étoiles les plus éloignées possibles les unes des autres (dans l’idéal avec 120 degrés entre chaque étoile), et effectuer la mesure au sextant peu avant ou après le coucher du soleil pour pouvoir bien distinguer encore la ligne d’horizon. Il faut également éviter de choisir des étoiles trop proches de l’horizon à cause de la réfraction de la lumière (voir loi de Snell-Descartes). C’est difficile lors de l’emploi du sextant de »faire descendre l’étoile sur l’horizon » (on peut facilement confondre une étoile avec une autre à côté), c’est pourquoi il est plus simple de l’utiliser à l’envers (limbe vers le haut), c’est à dire de « faire monter l’horizon sur l’étoile » de son choix. Généralement on ne peut utiliser des étoiles que placées proche du point d’horizon où se couche le soleil, au-delà c’est chaud de bien distinguer de façon nette la ligne d’horizon pour avoir un angle précis.
Pour mettre en place ce petit programme j’ai utilisé en grande partie un mémoire de master en astrométrie (introduction aux coordonnées célestes, astrométrie, Jleborgne) provenant de l’université de Toulouse, trouvable facilement en pdf sur le net, et d’autres trucs glanés ici ou là.
1) Système de coordonnées, définitions, mouvements impliqués
a) Coordonnées célestes
Le système utilise des coordonnées équatoriales; on va situer les astres selon leur position par rapport à l’équateur céleste qui n’est rien d’autre que la projection de l’équateur sur la sphère céleste. En fait c’est presque le même principe que pour se situer sur terre; pour positionner une étoile on va avoir:
–L’ascension droite souvent symbolisée par la lettre alpha, angle mesuré sur l’équateur céleste entre le point Vernal et la perpendiculaire à l’équateur céleste passant par l’objet étudié. Le point d’origine est donc le point Vernal et l’angle se mesure vers l’Est, cet angle s’exprime le plus souvent en heures mais est facilement convertible en degrés (1 heure=15 degrés, 1 degré=60 minutes, 1 minute=60 secondes), en heure elle varie donc de 0 à 24 heures (soit 0 à 360 degrés).
– La déclinaison souvent symbolisée par la lettre delta, angle mesuré perpendiculairement entre l’objet étudié et l’équateur céleste. Sa valeur peut monter au max à 90 degrés (-90 au pole sud et 90 au pole nord)et au minimum à 0 degrés (équateur). La déclinaison ressemble beaucoup à la latitude, elle est positive dans l’hémisphère Nord et négative dans l’hémisphère Sud.
–Le point Vernal souvent représenté par gamma ou simplement la lettre g, est un peu plus subtil à se représenter. Sur la sphère céleste l’écliptique (plan comprenant la terre et le soleil) et l’équateur céleste se croisent en deux endroits appelés noeuds, le noeud descendant quand le soleil passe de l’hémisphère Nord au Sud, et le noeud ascendant quand il passe de l’hémisphère Sud au Nord, bref à l’équinoxe de printemps (entre le 19 et le 21 mars).Nous allons voir que ce point de référence n’est pas fixe. En effet les équinoxes se déplacent d’environ 50 » par an le long de l’écliptique vers l’ouest. L’angle horaire du point vernal (ou temps sidéral) se compte à partir du méridien de Greenwich et on l’écrit généralement ahso ou ahgγ. Le point vernal se déplace presque selon une vitesse constante, cette vitesse fait environ 15.04166 degrés. Nous verrons que pour fiabiliser notre programme il va falloir encore plus de précision.
Pour les coordonnées célestes les coordonnées J2000.0 servent de référence, soit les mesures prises le 1er janvier 2000 à midi pile dans le calendrier Grégorien. Si on tape le nom d’une étoile dans wikipédia par exemple, la plupart du temps les coordonnées indiquées à droite de la page sont celles mesurées à J2000.0, pour avoir les bonnes coordonnées selon le moment de la mesure, des corrections à appliquer à ces valeurs sont indispensables.
b) Le calendrier Julien, calendrier Grégorien
Importants à comprendre pour faire notre programme; le calendrier Grégorien est un peu une version customisée du calendrier Julien, l’origine est la même tout comme les divisions en mois et semaines. La différence sera dans le choix des années bissextiles. Pour le calendrier Julien, il y a simplement une année bissextile tout les 4 ans (2008, 2012, 2016…) et pour le calendrier Grégorien, plus précis il y a une année bissextile si d’autres conditions supplémentaires sont réunies. Dans notre cas les caractéristiques du calendrier Julien suffiront. Bref dans le calendrier il y a 12 mois remplis alternativement par 31 (janvier, mars, mai, juillet, août, octobre, décembre) ou 30 jours (avril, juin, septembre, novembre). Exception pour février avec 28 jours pour une année « normale » et 29 jours pour une année bissextile, on arrive donc à 365 jours pour une année classique et 366 jours pour une année bissextile, soit une moyenne annuelle de 365.25 jours avec le calendrier Julien. Cependant cette durée ne colle pas parfaitement avec la durée réelle d’une année…Donc il va falloir bricoler un peu tout ce merdier pour que ça marche à peu prêt ! Un vrai boulot d’horloger stakhanoviste un peu maniaque sur les bords….
c) Qu’entend-t-on par « année » ?
Une année dans le calendrier Julien fait 365.25 jours. Mais il existe d’autres façons de qualifier une année:
–Année sidérale : révolution terrestre rapportée à un repère fixe. Elle dure environ 365 jours, 6 heures, 9 minutes et 10 secondes.
–Année tropique : temps entre deux passages successifs du soleil dans la direction du point vernal. Cette durée va être primordiale pour notre programme, notamment dans le calcul de l’angle horaire du point vernal. Elle dure environ 365 jours, 5 heures, 48 minutes et 45.26 secondes à J2000.0. Pour notre siècle elle décroit d’environ 5.23 secondes.Il y a une formule pour calculer l’année tropique moyenne trouvable un peu partout sur le net, c’est :
Année tropico =365.24219052-61.56*10^(-6)*T-0.068*10^(-6)*T^2+263*10*(-9)*T^3+3.2*10^(-9)*T^4. En 2000 elle vaut 365.2421898 jours et en 2100 elle vaut 365.2421291582 jours. T est le temps écoulé en siècles Juliens depuis J2000.0.
–Année anomalistique : temps entre deux passages successifs de la terre au périhélie. Elle dure à peu prêt 365 jours, 6 heures, 13 minutes et 53 secondes. Le périhélie c’est le moment où la Terre est la plus proche du Soleil (lois de Kepler), donc là où elle se déplace le plus vite.
d) Mouvements influant sur les coordonnées équatoriales
Pour notre plus grand malheur ces coordonnées ne sont pas stables (se serait trop simple), elles vont évoluer selon deux phénomènes cycliques appelés la précession et la nutation. La précession est due aux effets de marée sur la rotation de la terre. C’est un mouvement lent d’une période de 26000 ans environ mais de très grande amplitude car il peut monter jusqu’à 23.5 degrés environ (modifier la déclinaison d’un astre jusqu’à 23.5 degrés). La nutation due également à la marée a une période brève de 18.6 ans avec une amplitude faible comparativement à la précession : 9 secondes seulement. Du coup pour notre programmation, et aussi pour simplifier tout ça on peut négliger la nutation, on y perd un peu en précision mais bon…
On va utiliser ces formules pour le programme :
–Précession générale=p=50.290966+0.0222226T » par an, T temps écoulé en siècles Juliens (36525 jours) depuis J2000.0.
-p=m*cos(E)+n*sin(E), E inclinaison moyenne de l’écliptique (23°26’21.448 » à J2000.0). m est la précession en ascension droite, n est la précession en déclinaison.
-p=5029.0966+2.22226T-0.000042T^2 » par siècle.
-m=4612.4362+2.79312T-0.000278T^2 » par siècle.
-n=2004.3109-0.85330T-0.000217T^2 » par siècle.
La précession donne à la Terre une sorte de mouvement de « balle liftée » par rapport au soleil. Elle provoque également un changement d’étoile polaire; actuellement c’est Polaris qui indique le Nord mais ce ne sera pas éternellement le cas.
d) autres phénomènes impliquant des corrections
On va y trouver la réfraction atmosphérique bien sûr (loi Snell-Descartes), mais également l’aberration de Bradley, la parallaxe, la hauteur de l’observateur par rapport au niveau de la mer, l’erreur de demi-diamètre de l’astre observé. L’erreur de demi-diamètre de l’astre (voir droite de hauteur) est négligeable car une étoile c’est petit vu de notre position; on peut également ignorer la parallaxe en raison de l’éloignement important des étoiles, donc de sa valeur infime ici. On peut aussi s’en tamponner de l’aberration de Bradley…Heureusement on va quand même tenir compte du reste histoire que ça fonctionne un minimum !
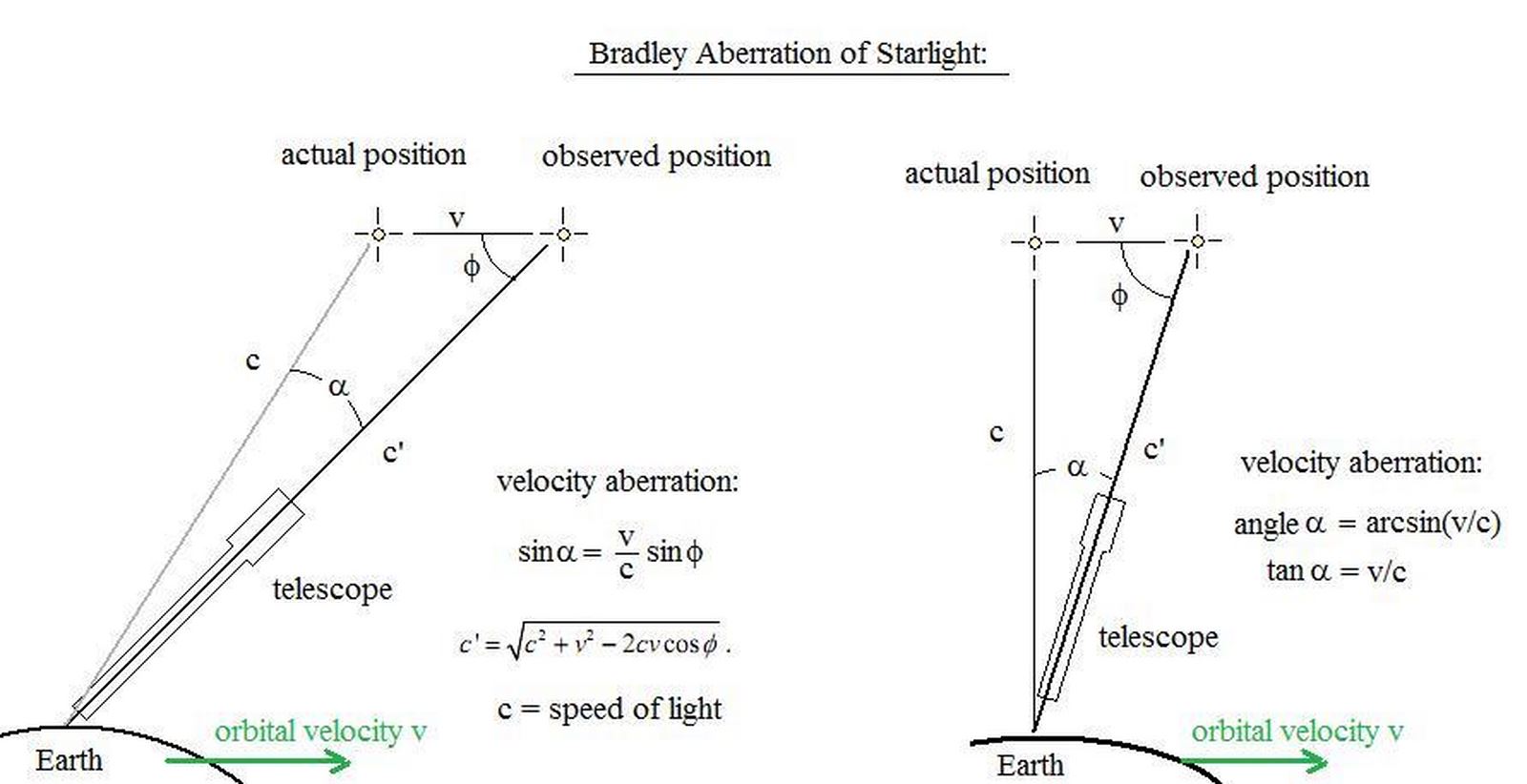
Aberration de Bradley : ce phénomène existe à cause de la vitesse finie de la lumière (environ 300000 km/s dans le vide) et de la rotation de la terre autour du Soleil (environ 30 km/s, varie selon sa trajectoire elliptique). Cela provoque en une année une légère rotation de toutes les étoiles autour de leur « point moyen » sur la voûte céleste; en fait l’étoile n’est pas fixe mais tourne autour d’un tout petit cercle ou une ellipse. La différence entre la position moyenne et apparente de l’étoile est de 20.5 secondes… Ce qui est relativement peu donc pour le programme on peut s’en balancer.
Cette différence entre position moyenne et apparente s’explique avec la formule présente dans le schéma ci-dessus : tan(alpha)=v/c ; or sur terre v=30 km/s environ et c=300000 km/s. Donc tan(alpha)=0.0001, donc alpha=0.00573°=20.6265 ».
Anecdotes :
.c’est difficile de se représenter ce phénomène mentalement, et comme on dit « un schéma synthétique vaut toujours bien mieux qu’un long discours un peu chiant », une analogie de situation peut-être bien pratique. Il y a l’analogie de Bradley lui même grâce à sa pratique de la voile sur la Tamise en observant un drapeau : ce dernier n’est ni dans le sens du vent, ni dans le sens de direction du bateau mais dans la composante vectorielle des 2. C’est pareil pour la position de l’étoile résultant de la composante vitesse de la Terre autour du Soleil avec la vitesse de la lumière.
. La parallaxe est utilisée comme outil pour savoir approximativement les distances d’éloignement de certains astres. Pour les étoiles les plus proches du système solaire la valeur de la parallaxe ne dépasse pas 1 seconde d’arc…Du coup on va pas trop s’embêter avec ça hein.
La correction de la réfraction atmosphérique varie selon la pression atmosphérique et la température ; sur wikipédia on nous donne une formule à employer quand on est au niveau de la mer, à pression atmosphérique constante de 1010 mbars avec une température de 10 °C. Cette formule, semblable d’ailleurs à celle du mémoire (c’est la même mais simplifiée) est la suivante :
R=(1.02/tan(Hv+10.3/(Hv+5.11)))/60 ; R est l’angle de réfraction en degrés, Hv est la hauteur vraie en mètres.
La dépression apparente de l’horizon, due à la hauteur de l’observation par rapport au niveau de la mer est trouvable sur plusieurs pages du web avec la formule suivante :
D=(1.77*√(E))/60 , D abaissement de l’horizon en degrés et E élévation de l’oeil en mètres.
e) Comment mesurer la hauteur d’une étoile ?
C’est le même principe que la droite de hauteur avec le Soleil. C’est l’angle horaire du point vernal qu’il faut utiliser, il va nous permettre de déterminer l’angle horaire local ahl de l’étoile :
ahl = ahgy – g + AV (g est la longitude du point estimé e, AV est l’ascension verse).
L’ascension verse est l’angle entre le méridien du point vernal et celui d’un astre mesuré comme un angle horaire, vers l’ouest et sur 360 degrés; elle est utilisée en nav astro pour situer une étoile.
L’ascension droite est l’angle entre le méridien du point vernal et celui d’un astre, mesuré vers l’Est et exprimé en heures. C’est le complément à 360 degrés de l’ascension verse. Par exemple l’ascension verse en janvier 2016 pour Bételgeuse est de 270.985 degrés. Donc l’ascension droite sera égale à 360-270.985=89.015 degrés. En général quand on cherche la position d’une étoile sur le net elle est donnée en déclinaison et ascension droite, à J2000.0.
Comme pour la droite de hauteur avec le soleil (voir droite de hauteur), les formules à intégrer pour les calculs sont les suivantes :
-sin (hc) = sin (L) * sin (D) + cos (L) * cos (D) * cos (AHL) ; hc est la hauteur calculée de l’astre, L la latitude du point estimé e, D la déclinaison de l’astre, et AHL c’est l’angle horaire local.
-cos (z^) = (sin (D) – sin (L) * sin (hc)) / (cos (L) * cos (hc)).
– Le relèvement calculé de l’astre est égal à z^ si 180°≤AHL<360°, et à 360-z^ si 0≤AHL<180°.
-L’intercept est la différence entre la hauteur vraie de l’étoile mesurée au sextant, et la hauteur calculée de l’étoile. Intercept = hv-hc. L’intercept s’exprime en milles.
Pour ceux qui sont toujours là et qui s’accrochent malgré tout, une petit aparté spirituel avant d’attaquer la suite :
2) Notre programme
Ce programme marche pour l’étoile Dubhé de la constellation de la Grande Ourse, mais il fonctionne également pour n’importe quelle étoile. Il suffit de remplacer les valeurs t (ascension droite de l’étoile le 01/01/16 à 00h00 utc) et u ( déclinaison de l’étoile le 01/01/16 à 00h00 utc). Ce programme marche à partir du 01/01/2016 à 00h00 utc jusqu’à l’année 2100 qui n’est pas bissextile (mais que ce programme intègre comme telle, ce qui est faux).
1) partie 1, transformer la date et l’heure en un seul nombre exploitable (ligne 1/ligne 36).
Jusqu’à la ligne se terminant par , g (ligne 36), le programme va changer l’heure, les minutes, secondes, mois et année de la mesure en un seul nombre décimal qui dans le programme se nomme g. Pour déterminer les années bissextiles on utilise une fonction cosinus (une fonction périodique sinus aurait pu tout aussi bien faire l’affaire); cette fonction sera égale à 1 tout les 4 ans. Quand cette fonction ici appelée i = 1, on peut voir que e (nombre de jours selon les mois) change. La partie avec les « elseif » détermine le nombre de jours écoulés dans les mois depuis le 01/01 de l’année de la mesure jusqu’à l’instant de la mesure.
int(365.25*f) détermine le nombre d’année cumulées entre l’instant de la mesure et le 01/01/2016. int() est une fonction qui ne garde que la partie entière d’un nombre, par exemple int(17.8)=17.
La ligne 35 réduit tout les paramètres de temps à la même unité (le jour), ils sont additionnés pour obtenir g. 2457388.5 (=2451545+5843.5) est le jour julien le 01/01/16 à 00h00.
2) partie 2, déterminer l’angle horaire du point vernal (ligne 37/ligne 45).
Ligne 37, 100+5.5/60 est l’angle horaire du point vernal ahso le 01/01/16 à 00h00 utc.
Aux lignes 37 et 38, grâce à g, on calcule ahso au moment de la mesure en décimal. On sait que le point vernal effectue en 24 heures plus de 360 degrés; pour avoir sa vitesse moyenne précise il suffit de diviser la distance effectuée (360 degrés de révolution entre 2 équinoxes successives en 1 an) par la durée mise par le point vernal. Cette durée correspond à l’année tropique moyenne longue de 365.2421898 jours. Donc (360/(365.2421898)+360)/24=15.0410686… Soit la vitesse moyenne environ du point vernal par heure (pour l’année 2000. Elle diminue très légèrement chaque année).
La durée de l’année tropique moyenne diminue actuellement environ de 5,24 secondes par siècle, -0.0524*16/(24*3600*36525) est donc le calcul de cette diminution de temps entre le 01/01/16 et 2016.
-0.0524*(g-2451545-5843.5)/(24*3600*36525) est le calcul de cette diminution de temps entre 2016 et l’instant de la mesure.
Entre les lignes 38 et 43, le programme donne la valeur de z (ahso) correcte, car avant ce passage z va rapidement être supérieur à 360.
z>DMS transforme les données décimales de z en données sexagésimales (degrés, minutes, secondes).
3) Partie 3, (ligne 46/ligne 76) calcul du relèvement calculé et de l’intercept.
Au début de cette étape on change les données sexagésimales du point estimé et de l’angle mesuré en donnée décimales exploitables pour les calculs. Dans le programme j’aurai aussi pu intégrer la collimation et l’excentricité du sextant employé mais je l’ai pas fait (c’est un mack 3…). Lignes 56 et 57 ce sont respectivement l’ascension droite puis la déclinaison de l’étoile Dubhé le 01/01/16. Ligne 58 à 61 on utilise les équations de la précession pour obtenir les coordonnées céleste de Dubhé à l’instant de la mesure. La ligne 62 calcule l’ascension verse de l’étoile au moment de la mesure, et…Et allez hop pour les irréductibles encore présent, petite pause contemplative ils le méritent bien ! (si ça peut en plus attirer plus de visiteurs sur le blog…)
Alors on en était où… Ha oui ;
Le reste du programme reprend les formules vues au début. La fonction If utilisée entre la ligne 70 et la ligne 72 détermine l’azimut vrai. Et maintenant, utilisation test !
3) Test
Pour faire un point d’étoiles réussi on a besoin de plusieurs ingrédients :
-Un horizon clair et dégagé.
-Une montre bien calée sur l’heure du méridien de Greenwich.
-Une TI89, une calculatrice programmable ou des éphémérides.
-Un sextant ou un truc pour mesurer la hauteur des astres.
-Une carte hauturière.
Pour ma part le jour de la mesure l’horizon n’était pas très net, et j’ai utilisé un vieux sextant mack 3 pour la faire du coup ça manque quand même un peu de précision. En plus la mesure s’est faite sur la Manche, donc la différence de hauteur d’eau due à la marée a pu aussi jouer sur cette précision.
Les conditions m’on permis d’effectuer 3 mesures, une sur Dubhé, une sur l’étoile polaire et une autre sur Alkaid (le bout du manche de la casserole sur la grande ourse). On reste donc malheureusement sur 3 étoiles très proches, mais ça donne déjà une petite idée malgré tout. Le point estimé e (choisit arbitrairement sur la carte) utilisé est de latitude 49°50′ Nord, et de longitude 1°5′ Est. Donc les coordonnées de e sont positives (latitude négative si Sud, longitude négative si Ouest).
Résultats:
.Pour Dubhé, la hauteur vraie est de 35°52′ relevée à 22h 32 min 52 secondes (heure locale, donc en UTC on enlève 2 heures) le 15/08/16. Le programme calcule ce résultat :
Donc en utilisant la carte, on part du point estimé e, puis pour chaque relevé on trace l’intercept ; du point e vers l’étoile si ce dernier est positif, et du point e vers la direction opposée à l’étoile si l’intercept est négatif. On peut ensuite tracer les droites de hauteur qui sont perpendiculaires aux intercepts afin de définir un triangle de positionnement. Alors le point obtenu nous situe environ à 80 km au sud de Fécamp (ma carte routière était trop petite pour tracer convenablement les droites de hauteur)… Alors que les mesures ont été prises à Pourville près de Dieppe… Il faudrait refaire un point d’étoile avec un horizon plus net et un sextant à tambour peut-être, avec des étoiles bien distancées également.
Ce petit programme fonctionne bien pour corriger les coordonnées célestes des étoiles, pour l’angle horaire du point vernal il est précis à 1° prêt (ça fait une marge d’erreur de 0.3 % environ). Il se base sur une année tropique moyenne or elle change tout les ans selon un nombre important de paramètres tels que la vitesse de la Terre autour du Soleil qui change au périhélie et à l’aphélie avec les lois de Kepler, l’influence de la Lune et des autres planètes également. Autrement dit en réalité la vitesse du point vernal n’est pas complètement uniforme mais varie un peu.
Pour améliorer ce programme on pourrait inclure la collimation, l’excentricité du sextant, également faire en sorte d’avoir directement les coordonnées des points d’intersections des droites de hauteurs à voir…Pourquoi pas améliorer la précision du point vernal et tenir compte de la nutation, Bradley,l’âge du capitaine…
Un truc pratique pour éviter de galérer avec les calculs à faire pour la navigation, surtout quand la mer bouge et qu’on a une choucroute plus ou moins bien calée dans le bide qui ne demande qu’à sortir, probablement sur la carte pour dessiner une nouvelle île, ou alors dans la descente : programmer à l’avance une calculatrice, on économise le temps passé à l’intérieur du bateau, c’est moins chiant et en général on s’épargne plus facilement des relents pénibles.
Sur internet l’almanach du marin breton a publié des programmes à intégrer dans une TI83 pour la droite de hauteur, l’amplitude lever/coucher du soleil, et les arcs capables. Pour une TI89 ces programmes fonctionnent très bien, il y a juste une ou deux petites modifications à faire:
Sur le fichier, le symbole E n’a rien à voir avec la fonction exponentielle. C’est une sorte d’abréviation de l’écriture scientifique : E^2=100, E^3=1000…Et quand on tape ce symbole on ne note pas le ^ sur la calculette. Dans un programme il faut toujours à chaque fois indiquer la fin de la fonction « IF » par un « ENDIF » sinon la calculatrice va marquer « erreur syntaxe » un truc dans le genre. C’est pourquoi à la ligne 2 du paragraphe « mécanique céleste dans calendrier julien » la phrase ne se termine pas par « End » mais « Endif ». Dans le programme pour obtenir l’amplitude lever/coucher du soleil il faut rajouter les « Endif » manquants pour qu’il fonctionne.
En regardant un peu ces programmes, on peut en déduire d’autres comme la méridienne, la distance orthodromique, l’angle orthodromique, le calcul de sa distance par rapport à un amer de hauteur connue:
Pour le calcul de la déclinaison solaire, le programme du marin breton tient compte du mouvement elliptique de la rotation de la terre autour du soleil (partie: « mécanique céleste dans le calendrier julien ») qui influe sur l’évolution de la déclinaison le long de l’année, et part d’un point précis de localisation du soleil dans le temps. Cependant il existe une formule simplifiée pour déterminer la déclinaison du soleil ne tenant pas compte de tout ça et qui considère la trajectoire de l’orbite terrestre comme parfaitement circulaire (en réalité elle est quasiment circulaire, sa forme elliptique est vraiment très peu prononcée avec une excentricité de l’ellipse égale environ à 0.017. L’excentricité d’un cercle est de 0 pour se faire une idée). Cette formule, moins précise que celle exposée au début, est quand même bien pratique tout en étant aussi beaucoup plus simple!
Cette formule nous permet de faire un petit programme pour trouver une déclinaison solaire selon le jour, le mois, l’heure (pour l’année 2015 en la comparant au programme du marin breton la différence ne dépasse pas 1 degré vers mi octobre, pour le reste c’est assez précis) sans avoir à bord les éphémérides. Un second programme inspiré du premier permet d’avoir un calcul encore plus précis (on tient alors compte de l’ellipse) :
Pour ces formules de la déclinaison on utilise une fonction sinus car si on met les jours de l’année en abscisse et les valeurs possibles de la déclinaison à l’année, sa forme représente le plus possible le phénomène. Avec une fonction cosinus se serait possible peut-être je pense j’ai pas essayé. Pour les paramètres d’une fonction sinus, c’est à dire comment la bidouiller pour changer sa période, son amplitude son point de départ c’est assez simple : on va prendre cet exemple : A*sin(B(x-H)). Le paramètre A règle l’amplitude de la fonction (valeur maxi et mini qu’elle peut atteindre), B règle la période car la période de la fonction sinus est égale à 360/B ( valeur absolue). Enfin le paramètre H règle le déphasage, par exemple la fonction y=sin x est une fonction impaire ayant pour centre de symétrie l’origine o, donc si x=0 alors y=0. Si maintenant on pose y=sin (x-3), alors y=o si x=3 donc on aura décalé la fonction sinus de 3 vers la droite sur les abscisses, on l’aura déphasé de 3 quoi.
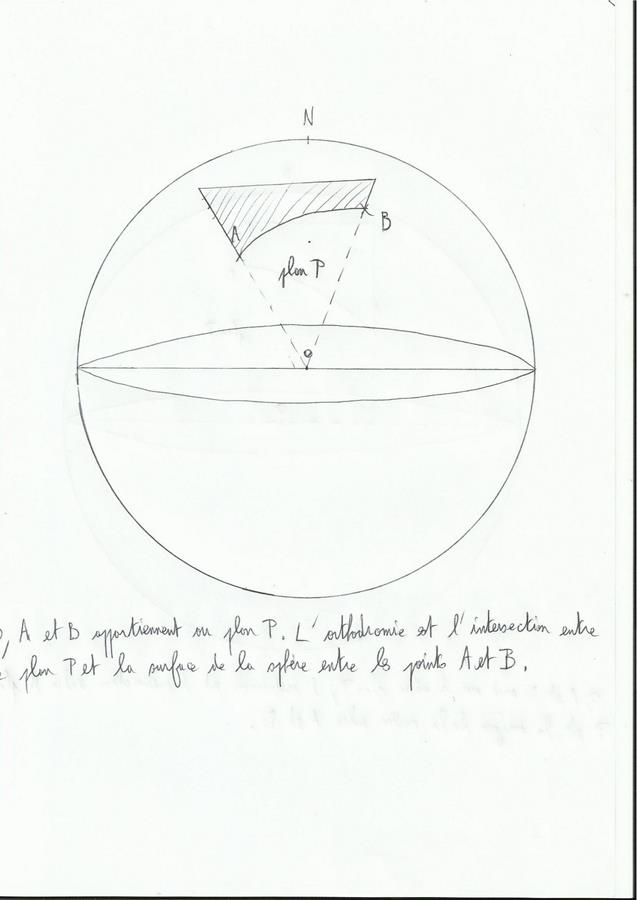
Normalement sur une surface plane le chemin le plus court entre deux points est la droite qui passe part ces deux points, point barre. Sur une sphère comme la terre par exemple, ça se complique un peu; on va alors parler de loxodromie et d’orthodromie (voir la page sur la projection de Mercator). La distance la plus courte sur le globe entre deux positions sera l’orthodromie : c’est la trajectoire confondue avec le demi arc de grand cercle du globe, le demi grand arc est un plan qui coupe le centre de la sphère et les deux positions. Le grand cercle est un cercle capable d’être tracé sur la sphère et dont le périmètre égalise celui de la sphère. Si sur le globe on suit une route nord/sud ou sud/nord(bref si on suit un méridien), ou que l’on suit l’équateur alors on est déjà sur une route orthodromique, du coup pour les calculs qui vont suivre on s’en fout.
Exemple d’une orthodromie:
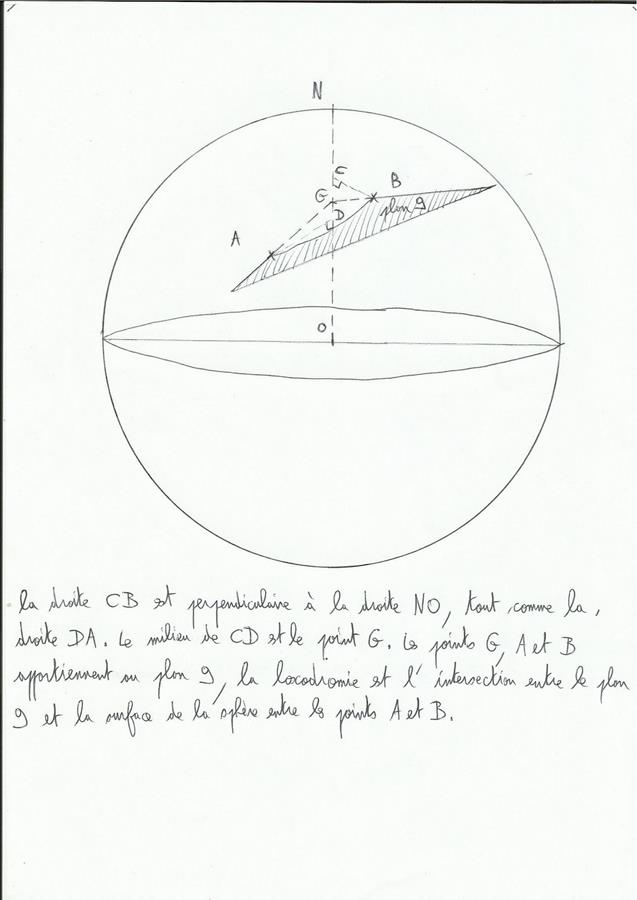
La loxodromie est la droite que l’on trace sur une carte Mercator classique de nav (excepté les routes suivant l’équateur ou un méridien), elle coupe les méridiens avec à chaque fois le même angle. En fait, à cause des caractéristiques de la représentation de Mercator ce n’est pas la route la plus courte; si on traçait correctement la route la plus rapide sur la carte, c’est à dire l’orthodromie, elle ne serait pas représentée par une droite mais par une courbe. Si on est dans l’hémisphère nord elle sera bombée vers le nord, inversement pour l’hémisphère sud (plus l’on se rapprochera des pôles, plus elle sera bombée). En gros l’orthodromie est un problème intéressant pour les longues navigations, plutôt proches des pôles et plutôt orientées est/ouest ou ouest/est. Bref pour une sortie dominicale tranquilou en pédalo c’est pas indispensable de s’en inquiéter quoi.
Exemple d’une loxodromie:
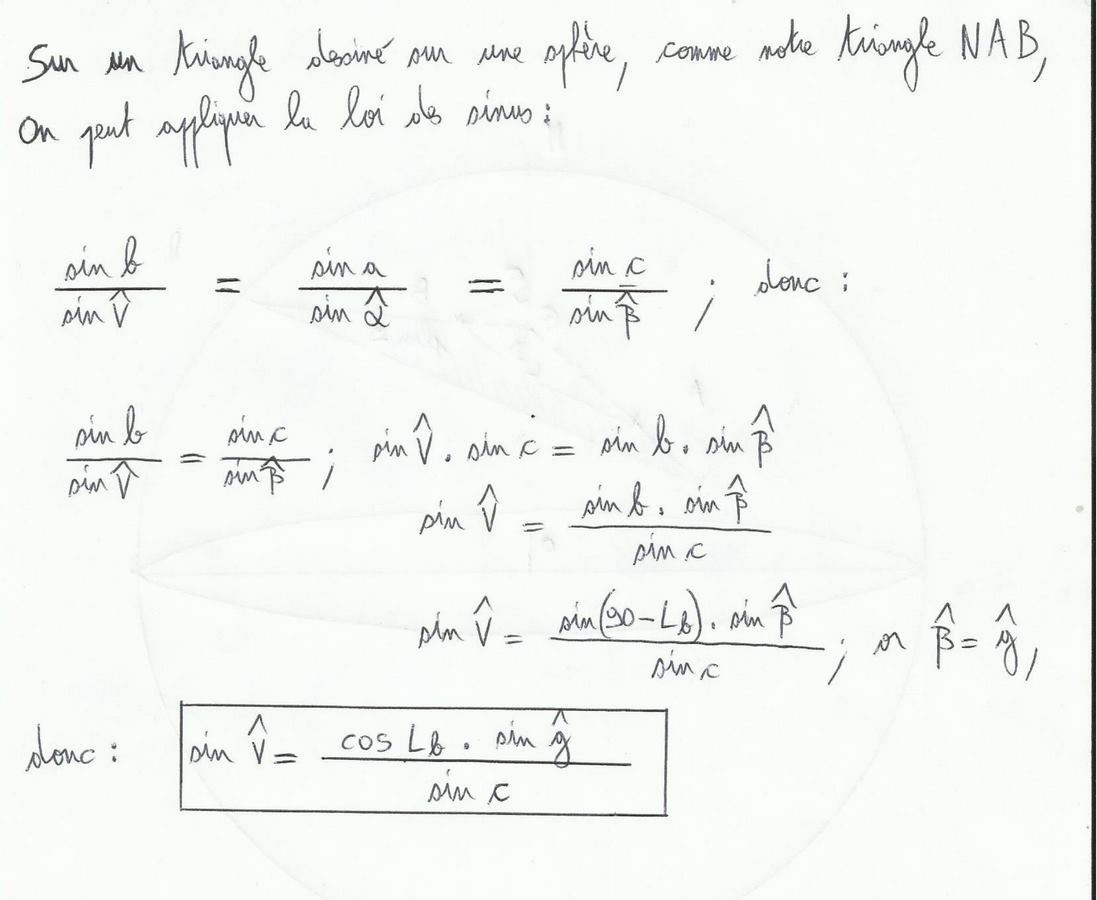
Pour les calculs c’est simple on va utiliser les mêmes trucs que pour trouver la formule de la droite de hauteur : théorème de Pythagore, produits scalaires, trigo et trigo sphérique. La seule notion à utiliser en plus est la loi des sinus (pour trouver le cap de départ de la route orthodromique).
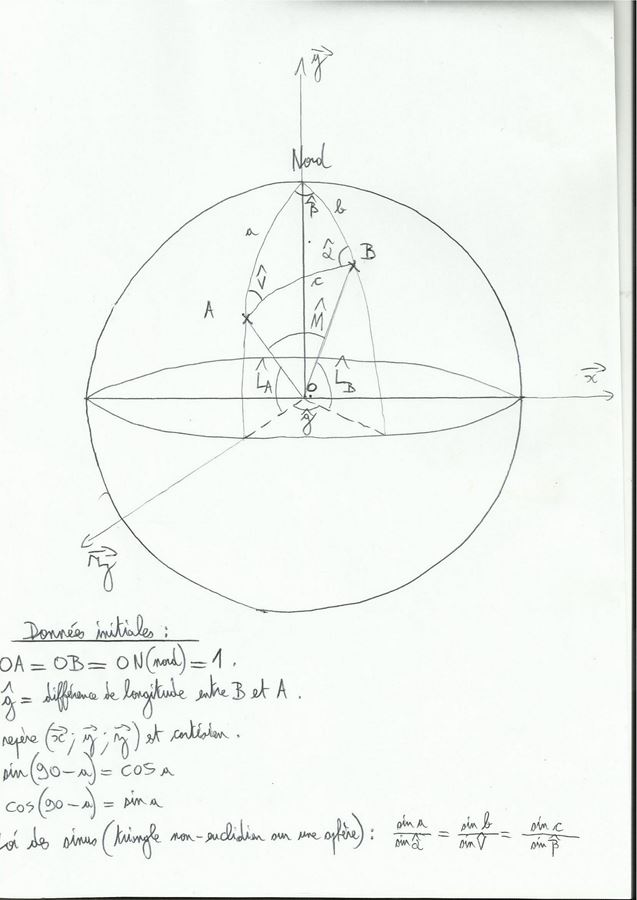
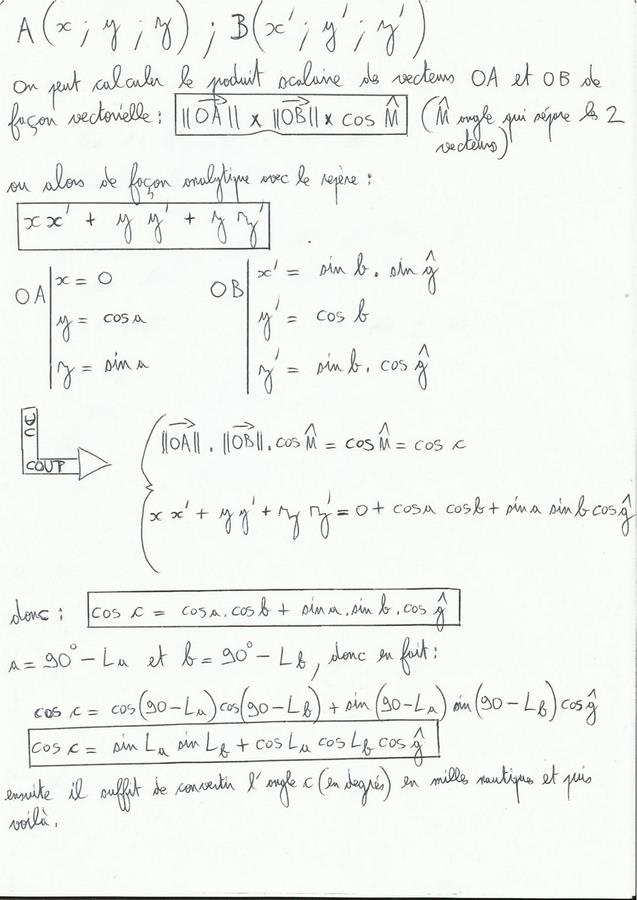
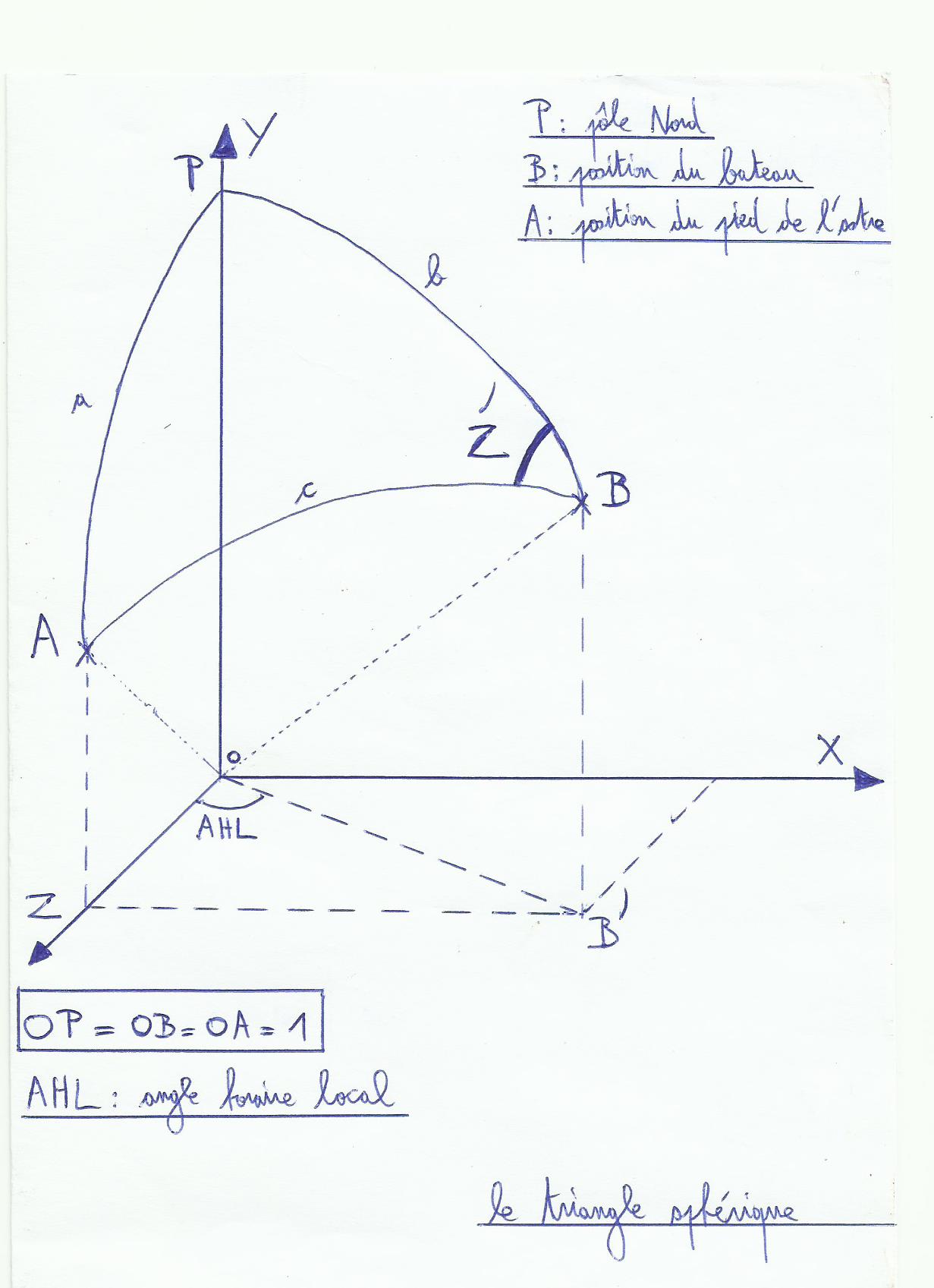
1) Calcul de la distance orthodromique(sur le schéma, la distance c, soit l’angle M)
Dans le schéma, on symbolise le globe par une sphère de rayon 1, de centre o inscrite dans un repère cartésien en 3D (x;y;z) d’origine o également. les point A, B et N (pour le nord) sont sur la sphère donc OA=OB=ON=1. Le point A appartient ici au plan (y;z), donc il est de coordonnée o sur l’axe des x. L’angle g est la différence de longitude entre B et A, g ne dépasse pas 90 degrés. L’angle La est la latitude de A et l’angle Lb la latitude de B:
2) Calcul de l’angle V
L’angle V donne le cap initial à emprunter pour suivre l’orthodromie:
En fait, en navigation dès que l’on a une position précise il faut à chaque fois recalculer cet angle pour se repositionner correctement sur l’orthodromie. En pratique ce n’est pas forcément utile de suivre à tout prix cette route, les systèmes météo vont être la priorité en général. Mais chercher à s’en approcher sur une transat par exemple peut permettre d’économiser des milles en optant pour une route composite météo/orthodromie.
PS : dans l’article « programmer une ti89 pour la navigation », il y a un petit programme donné pour calculer la distance orthodromique et l’angle V. Bon il est nul…Avec l’aide d’un bon bouquin (navigation en haute mer de olivier stern-veyrin) j’en ai fait un autre qui compare en plus le gain entre la route orthodromique et loxodromique, et qui calcule le vertex.
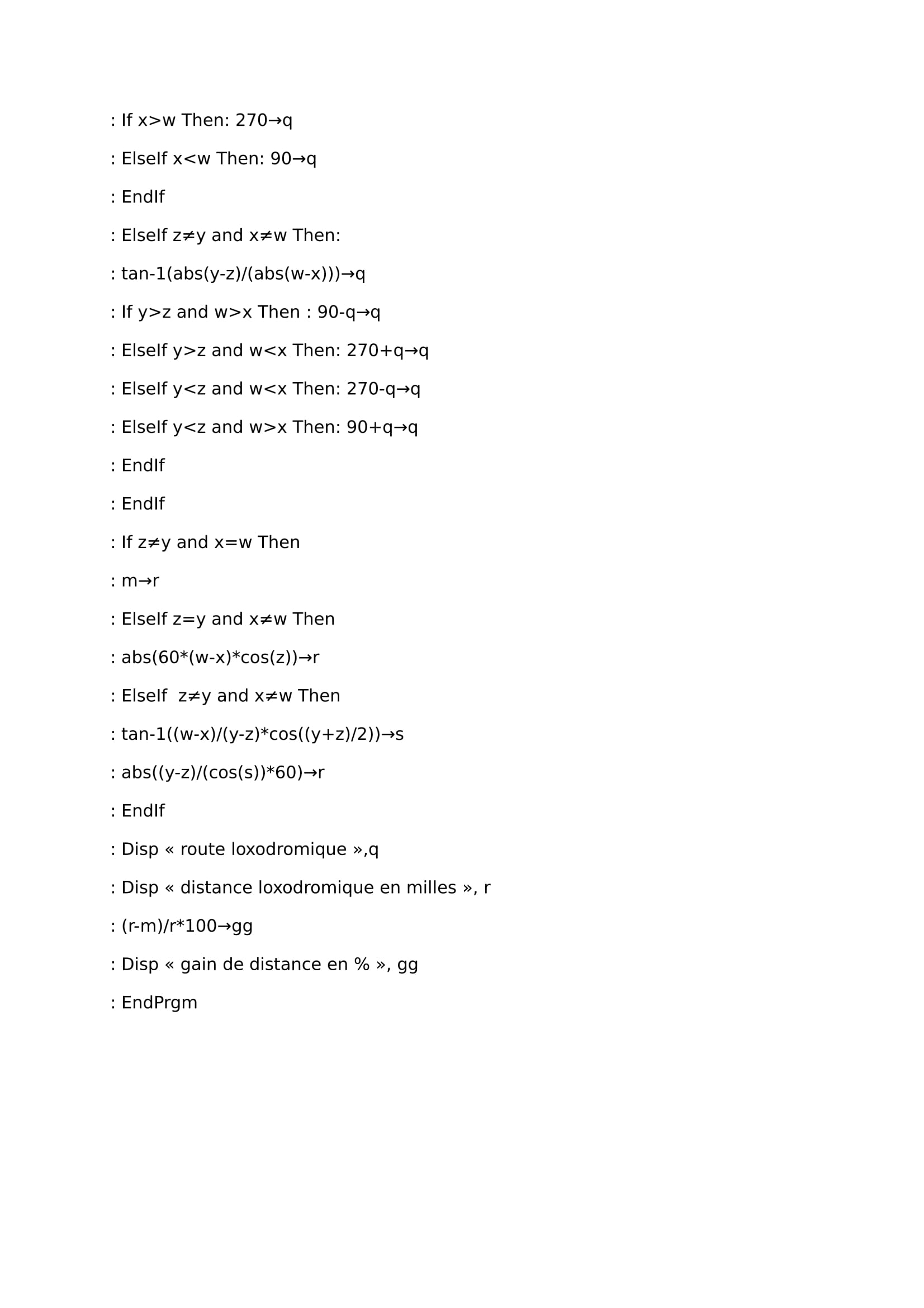
Ce programme ci-dessous donne en effet la valeur absolue du vertex en latitude, et sa distance en longitude par rapport au point de départ, seulement sur des routes bien orientées est/ouest. Il donne une valeur approchée de la loxodromie (distance), il existe une formule plus précise (voir wikipépé) mais je n’ai pas réussit à la programmer.
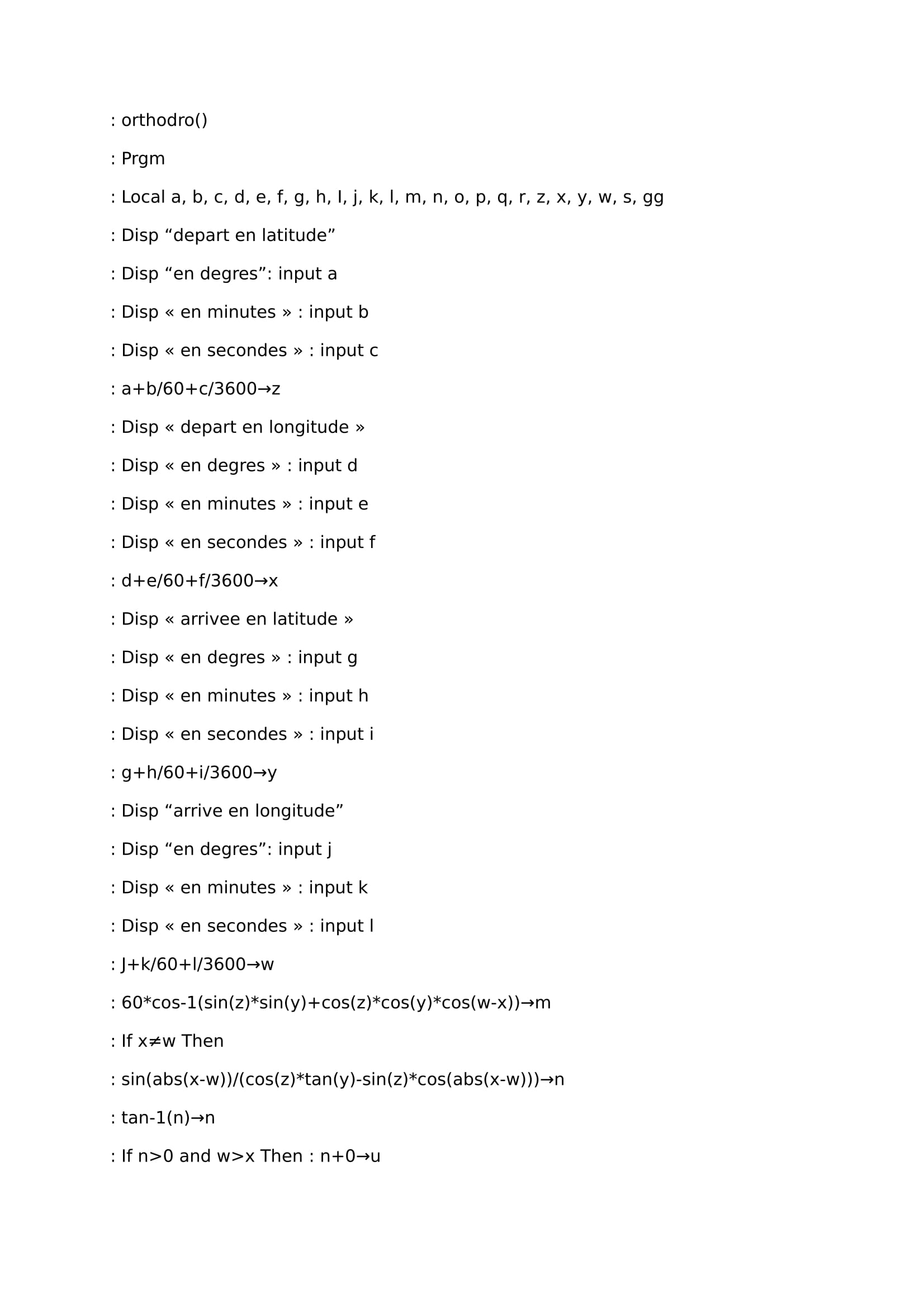
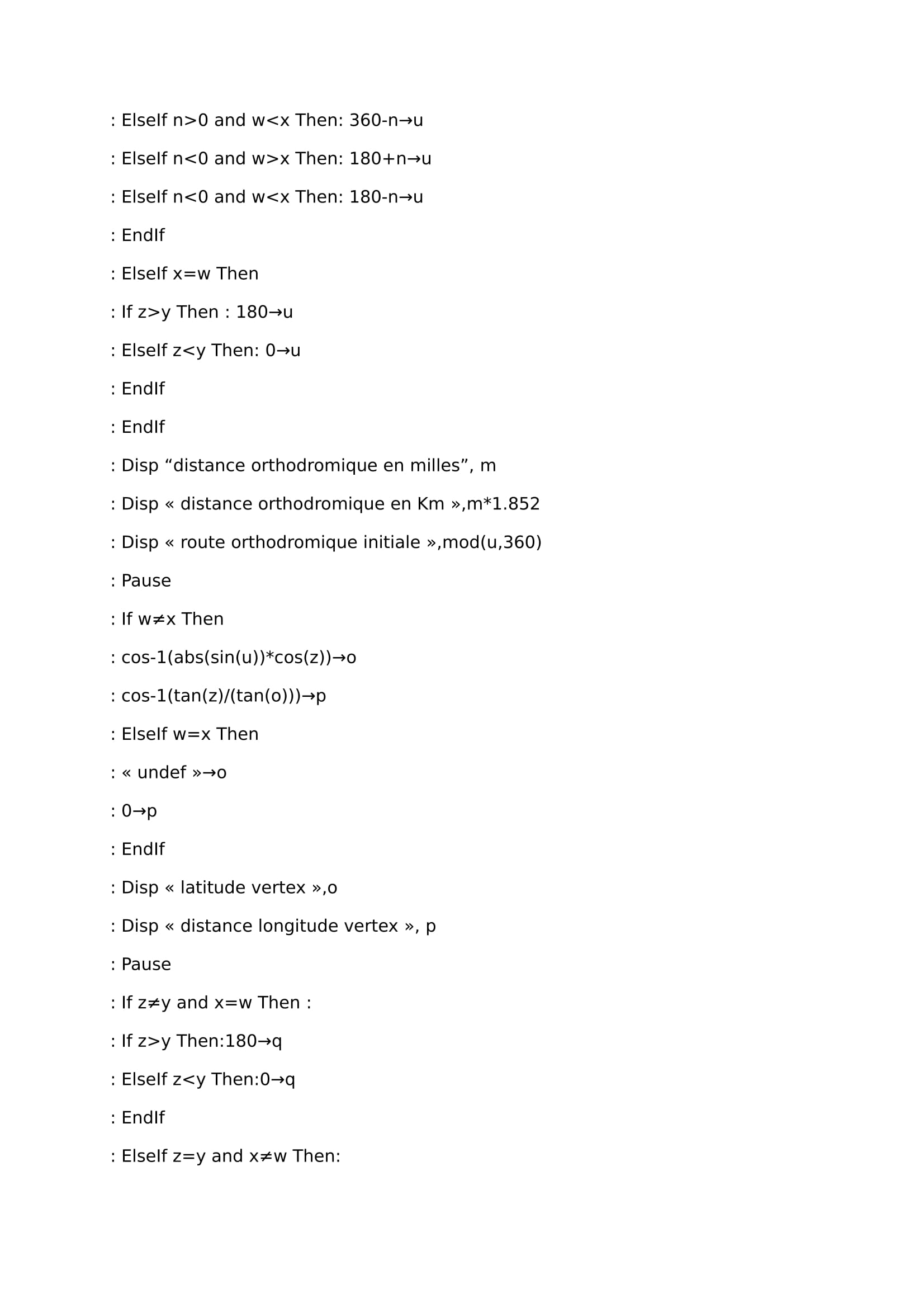
Programme de calcul de l’orthodromie:
J’ai vérifié le bon fonctionnement du programme avec le site « https://www.aero-training.fr/calculer-une-orthodromie.html ». il marche très bien pour la distance orthodromique et le cap orthodromique, comme le cap de la loxodromie. Pour la distance loxodromique il reste précis mais il perd en précision au delà de 400 Mn environ.
Plutôt facile d’utilisation(on appuie sur un bouton et hop ayé c ‘est bâché on a sa position), le principe de fonctionnement du gps est plus difficile à saisir, en gros il va utiliser le temps comme mesure pour déterminer des distances(entre nous et les satellites appropriés)et par recoupement de ces distances(un peu comme un point à 3 relèvements)il va afficher notre latitude et longitude. Actuellement le nombre de satellites utilisés pour ce système dépasse les 24, et ils orbitent autour de la terre à environ 11000 milles. Il y en a autant pour être sûr que au moins trois soient visibles en tout point de la terre en même temps. On va voir aussi que le gps fait intervenir les lois de la relativité restreinte et générale d’Einstein pour obtenir une très bonne précision, non non c’est pas des conneries!
1) Un point à trois relèvements en 3 dimensions
En navigation côtière lorsque l’on fait un point à trois relèvement et qu’on le trace sur la carte, on travaille dans un plan en deux dimensions.
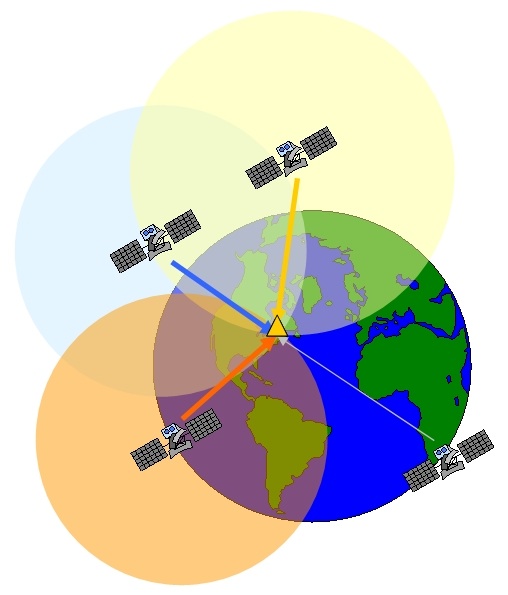
Pour le positionnement avec le gps c’est pareil sauf que là on travaillera en 3D. Le relèvement d’un satellite ne nous situera pas sur une droite mais sur une sphère dont le centre sera le satellite. Le recoupement de ces trois sphères indique deux positions, une sur terre et une autre à l’extérieur qui du coup ne sera pas gardée. Le relèvement compas nous donne un angle et le relèvement du satellite nous donne une distance.
Sur ce schéma on remarque la présence d’un quatrième satellite, tiens c’est vrai qu’est-ce qu’il fout là celui là ?
La mesure de la distance entre nous et le satellite est le produit de la vitesse de la lumière(vitesse du signal, 300000 km/s environ dans le vide)avec le temps de réception du signal, donc pour avoir une mesure précise de cette distance il faut que l’horloge interne des satellites et du récepteur soient d’une part synchro et en plus extrêmement précises. Si un satellite envoie un signal au temps 1 et que le gps le reçoit au temps 2, le temps de trajet et donc la distance ne peut être connu que si les horloges sont synchro, si elles ne le sont pas le temps de trajet est faussé et du coup la distance calculée est faussée aussi.
Pour obtenir une précision à la nanoseconde les satellites sont équipés d’horloges atomiques internes, et elles sont toutes synchro entre elles. Problème: une horloge atomique coûtant la peau des fesses, un bras, les yeux de la tête et une bonne blinde on ne pouvait en équiper tout les gps. On a donc trouvé une parade, on l’étalonne par rapport aux horloges des satellites grâce à un quatrième satellite. Si l’horloge du gps est bien réglée, la sphère de positionnement du quatrième satellite doit couper les autres au même endroit(le petit triangle sur le schéma). Si ce n’est pas le cas, le gps corrige le temps de son horloge pour que ça coincide, dingue non ? en fait le gps donne non seulement un point précis mais aussi le temps avec une précision atomique car il règle son temps en permanence avec celui des satellites, équipés d’horloges atomiques.
2) Tout est relatif…
Comme on vient de le voir le principe du gps se base sur la mesure du temps de parcours de signaux électroniques se déplaçant à la vitesse de la lumière, il est donc important que les horloges sur terre et celles des satellites soient synchro, or l’emploi d’un quatrième satellite n’est pas suffisant…car le temps local du récepteur(le gps) et des satellites n’évoluera pas de la même façon à cause notamment de la grande différence de vitesse entre les deux, bref c’est le bordel.
a. La relativité restreinte
En gros son principe remet en cause la notion de temps absolu. Auparavant on croyait que le temps s’écoulait de la même façon et à la même vitesse partout dans l’univers et pour tout le monde, et que la vitesse de la lumière était infinie. En fait c’est la vitesse de la lumière qui est une notion absolue et finie, le temps est relatif à son sujet selon sa vitesse par rapport à la vitesse de la lumière. Le paradoxe des jumeaux(appelé aussi paradoxe des horloges)illustre bien le problème. On prend deux jumeaux, on en met un dans un vaisseau spatial capable de se déplacer à un vitesse proche de la lumière, et l’autre reste sur terre. Si le premier part acheter du pain sur Osiris (une exoplanète)en navette spatiale, il va revenir plus jeune que celui resté sur terre! Pour comprendre le phénomène les plus courageux pourront s’intéresser aux équations de Lorentz, bien expliquées dans le bouquin « la relativité » d’Einstein, sinon en allant sur youtube il y a un épisode de la quatrième dimension qui illustre ce principe. Cela n’est valable que quand les différences de vitesses sont proches de la lumière, on ne vas pas vieillir plus lentement en faisant du 300 à l’heure sur l’autoroute! On risque même le contraire là…
Un satellite gps se déplace à environ 14000 km/heure, donc sa vitesse est non négligeable par rapport à celle de la lumière…
Petite équation simple pour se rendre compte du phénomène:
S=√(1-v²/c²)
S est le facteur de contraction, il indique le changement relatif du temps et de l’espace dans un objet à la vitesse v. Pour notre navette spatiale qui roule à 150000 km/s ça donne:
S=√(1-150000²/300000²)=0.87, le temps dans la navette évoluera à 87% du temps de référence(la terre), donc le temps dans la navette se déroulera 13% moins vite que celui de la terre.
Pour notre satellite qui se déplace bien vite par rapport à notre récepteur gps cela créer un décalage infime mais non négligeable de 8 microsecondes par jour de retard par rapport à notre temps.
b. La relativité générale
Tout le monde connaît l’effet Doppler, particulièrement les gendarmes qui en on fait leur fond de commerce… immobile dans la rue, si une moto se rapproche de nous son bruit de moteur va monter dans les aigus, et quand elle s’éloigne de nous ça bascule dans les graves.
Si on connait la vitesse du son dans l’air(environ 340m/s)on peut alors calculer la vitesse du véhicule. Et bien cet effet marche aussi avec la lumière! et comme la vitesse de la lumière est liée au temps…C’est la zone!
Dans notre cas on vas alors parler d’effet Doppler gravitationnel(pour le placer en soirée où à table celui là c’est chaud), explication: la lumière peut se présenter sous la forme d’un transfert d’informations via les photons, particules n’ayant pas de masse donc capable d’atteindre dans le vide la vitesse maximale de 300000 km/s. Mais même sans masse les photons sont déviés par la gravité, et la gravité est équivalente à une accélération. De plus la lumière est à la fois une onde(comme le son…)et un mouvement de particules. Conclusion: un champ de gravité accélère les photons et augmente les fréquences de la lumière. En gros la fréquence de la lumière sera augmentée quand le satellite enverra son signal vers nous, et elle sera ralentie quand le signal ira de bas en haut à cause de la gravité. En fait le champ gravitationnel plus fort sur terre ralenti la lumière et donc le temps par rapport au champ gravitationnel du satellite.
Ce principe de relativité générale provoque un décalage de 46 microsecondes par jour entre notre temps local et celui du satellite(46 microsecondes en moins pour nous donc).
Le gps doit donc corriger par jour un décalage de 38 microsecondes environ, sinon il perdraitchaque jours 12 km de précision!(299792458 m/s multiplié par ces 38 microsecondes donne presque 12 km) Malgré sa simplicité d’utilisation, le gps utilise finalement des concepts complexes.
Parfois quand le gps a un petit coup de barre, et quand on navigue dans des zones avec des fonds très variables, avec notamment une présence abondante de rochers immergés ou à fleur d’eau, le tout saupoudré par un marnage important, il est important de savoir éviter les dangers. Il vaut toujours mieux savoir précisément où l’on n’est pas plutôt que de ne pas savoir où l’on est!
1)Les repères
Pour se repérer sur le plan d’eau on va utiliser surtout des repères bien visibles, fixes(éviter au maximum les bouées, en mouvement autour de leur coffre) et bien identifiables, les amers(exemple phare, perche, cheminée…), et le sondeur. Les amers choisit doivent être lisibles sur la carte et surtout pas confondus avec un autre(attention quand on choisit un château d’eau…à éviter quand il y en a plein dans le coin). Dans les eaux sans marée le sondeur nous permet de nous positionner directement sur la carte par rapport aux lignes de sonde, avec marée il faut prendre en considération le calcul de marée et le combiner aux indications du sondeur.
2)Les outils
Avec l’aide de ces amers et du sondeur on va pouvoir se positionner sur un point ou sur une zone du plan d’eau, il y a pour ça différents outils que j’ai classé du plus précis au moins précis.
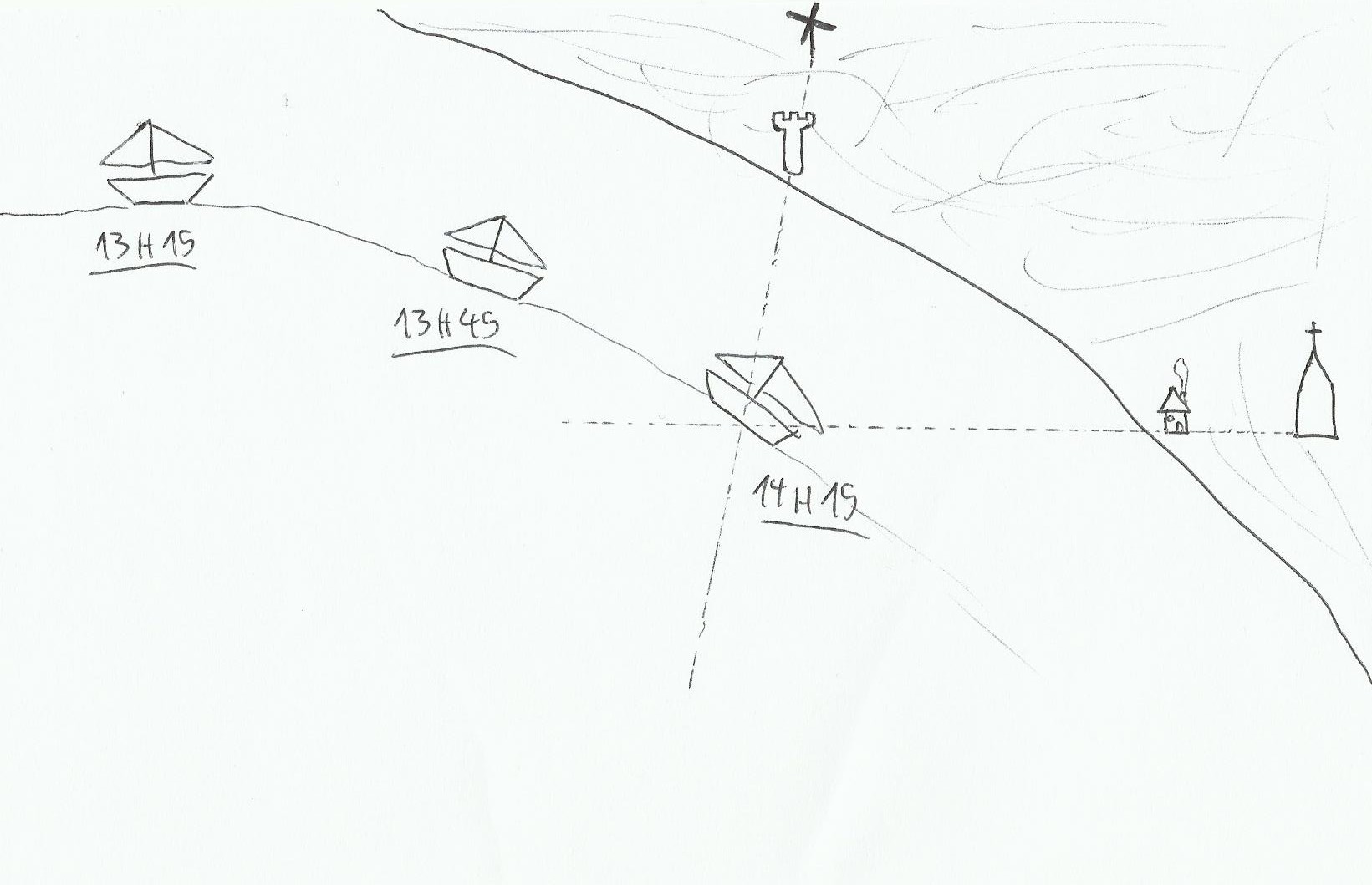
Deux alignements: quand on observe simultanément deux alignements de deux amers chacun. C’est plutôt rare, mais on peut alors tracer sur sa carte sa position aisément(à 14h15 quand on remarque les deux alignements, on peut se positionner très précisément).
Un alignement et une ligne de sonde: dans ce cas on observe un alignement de deux amers, et au même moment le sondeur nous indique un passage sur une profondeur facilement reconnaissable sur la carte.
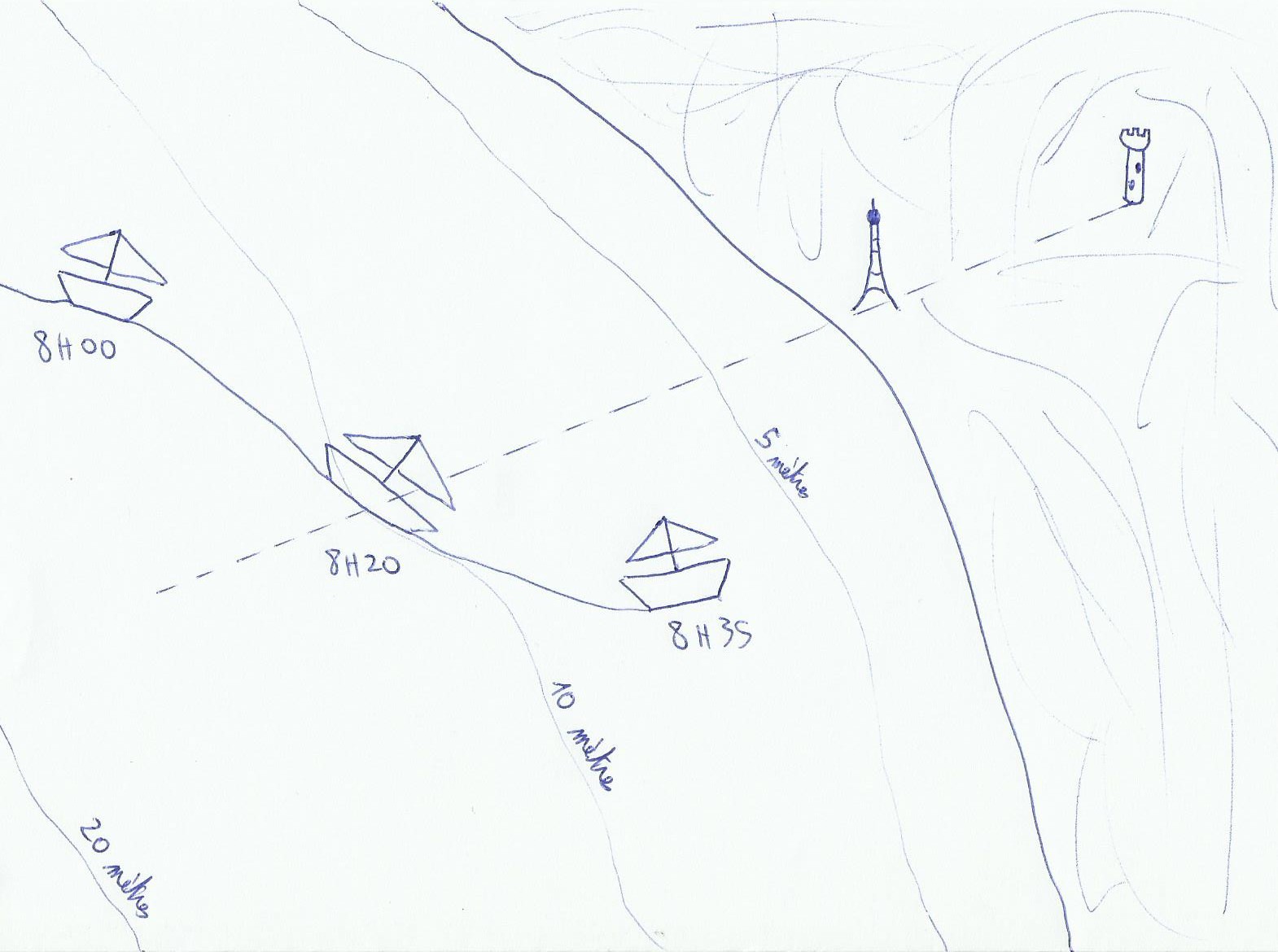
à 8h20, le sondeur nous indique 10 mètres, on connait sa position(dans des eaux à marée il faut tenir conte en plus du marnage!).
Un alignement et un relèvement: cette fois on va utiliser le compas de relèvement. Par exemple on suit un alignement(c’est donc un alignement de route)et on repère à tribord un amer isolé, on le relève plein nord.
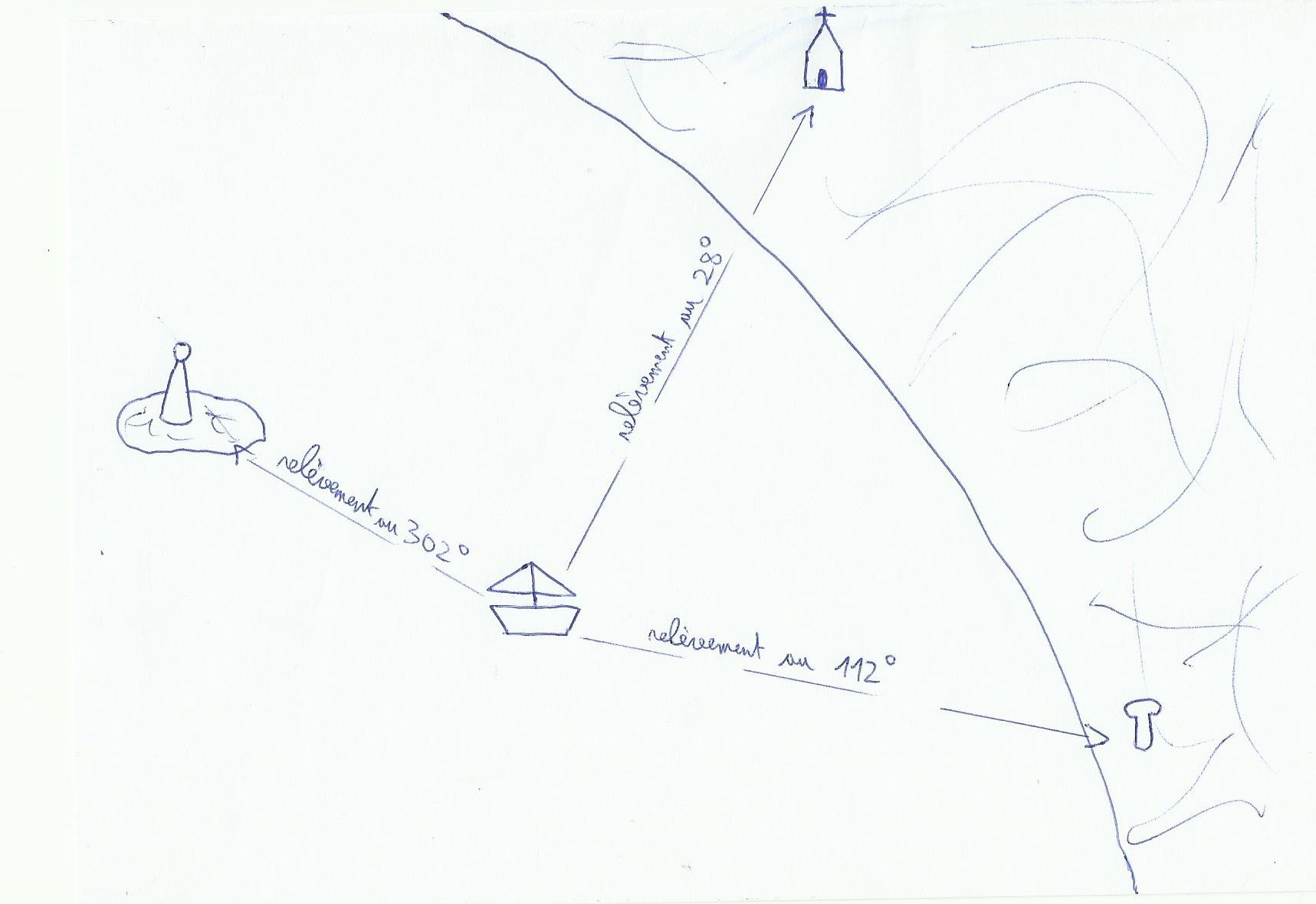
Un point à trois relèvements: plus les trois amers sont espacés(dans le meilleur des cas, 120° entre chaque amer, alors là c’est noel!)plus le point sera précis. Le tracé des trois relèvements sur la carte se rejoint au mieux en un seul point(rare), sinon en général il forme un triangle de positionnement, nous évoluons quelque part dans ce triangle(. Pour vérifier la validité du point on peut jeter un coup d’œil au sondeur.
2)Eviter les zones dangereuses
Alignement: on dit qu’un alignement est ouvert à droite quand l’amer le plus éloigné est à droite de celui qui est devant, si il est ouvert à gauche, il est à gauche. Quand on parle d’alignement ouvert, on utilise un alignement de sécurité. En fait dans ce cas lorsque l’alignement se ferme, il nous indique le passage dans une zone à éviter. Il va falloir maneuvrer.
Dans la zone A, sans danger l’alignement va être ouvert à droite. En s’approchant de la zone B il va se fermer petit à petit.
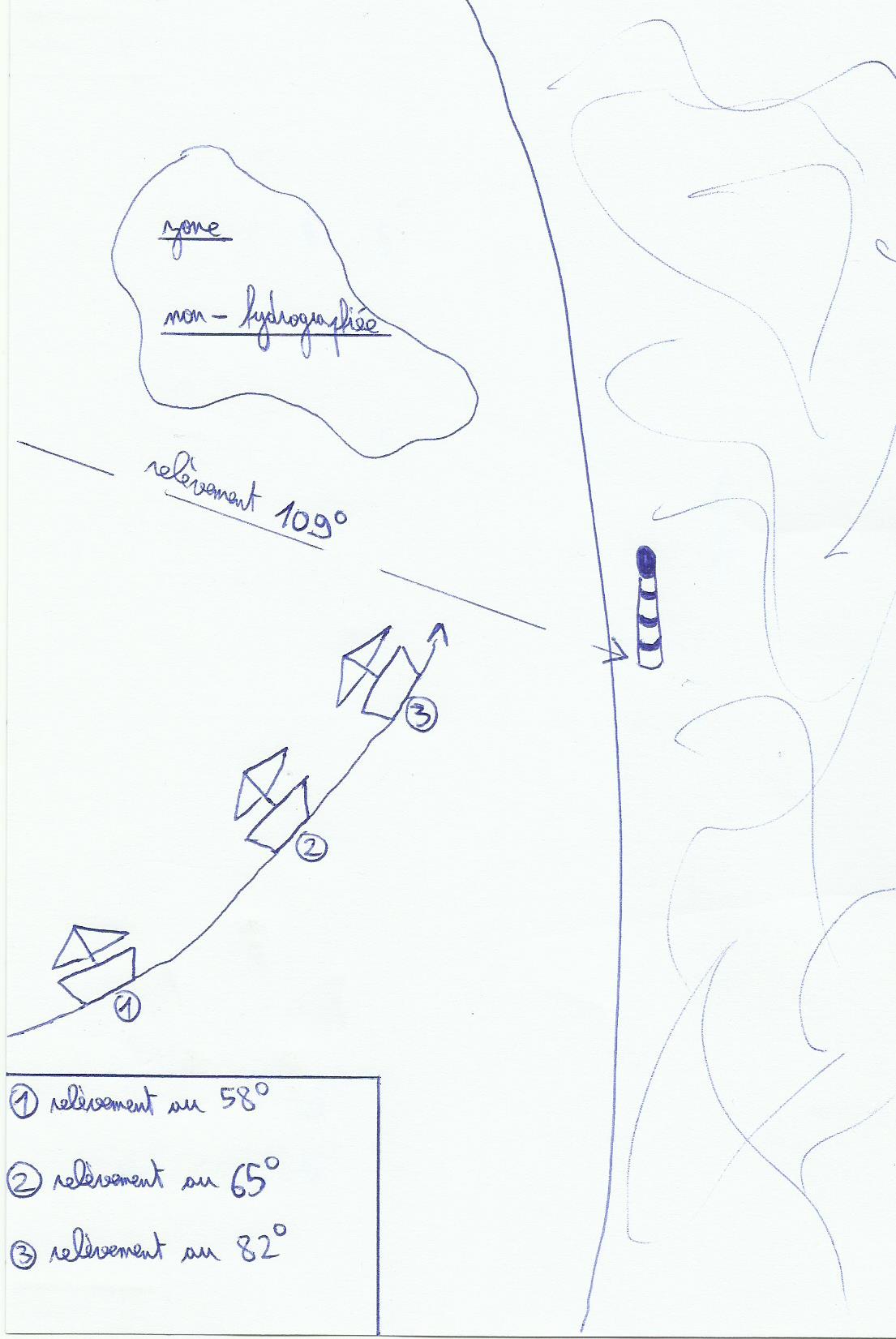
Relèvement: le relèvement d’un amer nous permet d’éviter une zone dangereuse.
On se fixe une marge de sécurité, elle nous donne un relèvement de 109°. Cela veut dire que si le relèvement de l’amer dépasse les 109°, on est trop au nord par rapport à lui, donc on est dans la zone non-hydrographiée.
Sonde: Le sondeur peut nous permettre d’éviter un danger si ce dernier est entouré par une ligne de sonde significative et suffisamment éloignée de lui.
A 15 heures on sait que l’on entre dans la zone entre 20 et 10 mètres.
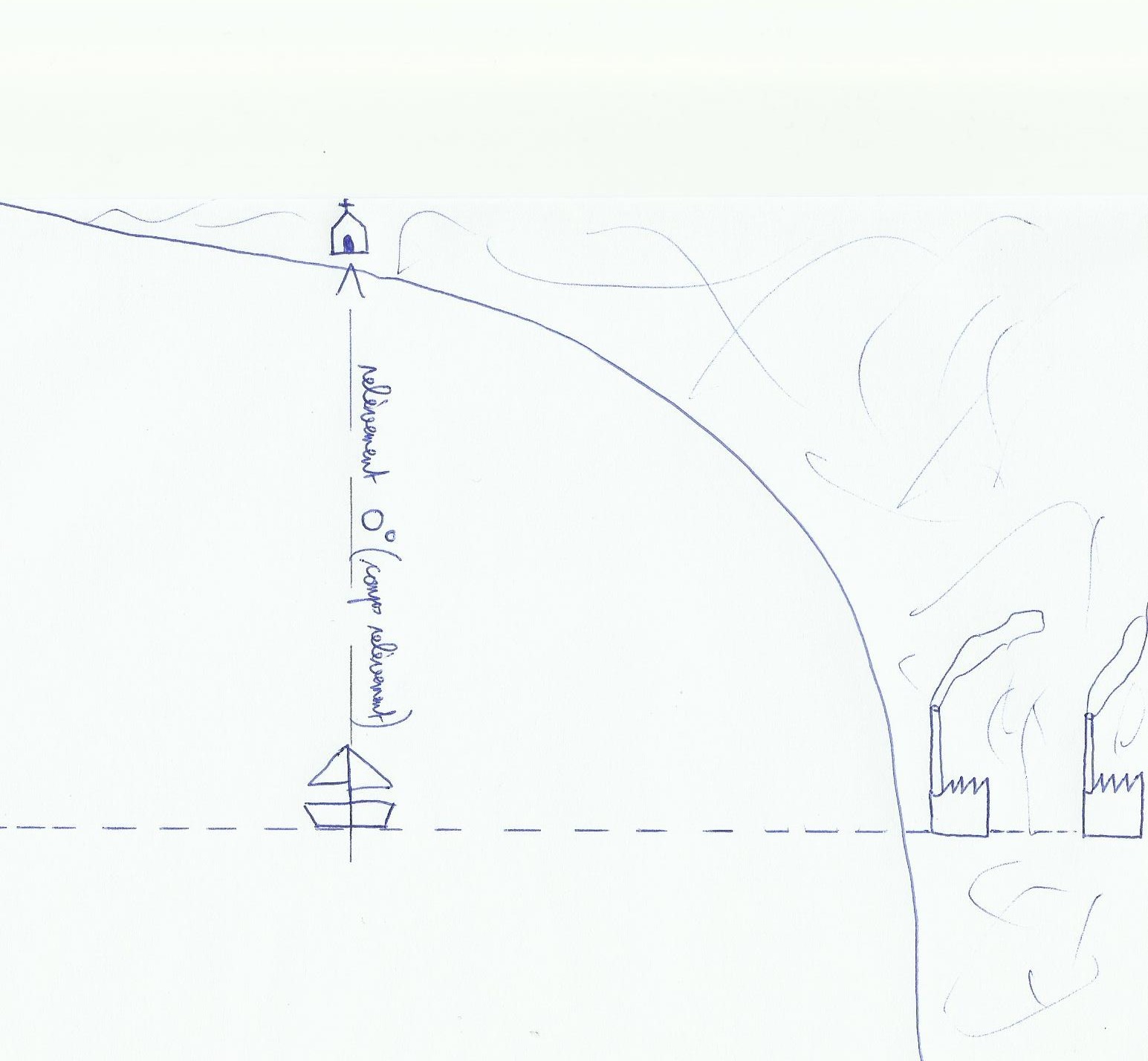
Au cas où il n’y a pas de ligne de sonde pour parer les dangers autour d’un phare, d’une île ou un amer isolé, on peut utiliser la hauteur du danger, phare ou amer en question:
En fait on se sert simplement des vieilles formules de trigo barbantes apprises au collèges, comme quoi elles peuvent servir en fin de compte! Si on oublie 1852 dans la formule la distance d’éloignement de l’amer est donnée en mètres. Sachant que le bout de l’index fait un angle d’environ 0,5° quand le bras est tendu sur la voûte céleste, on peut trouver approximativement l’angle alpha sans pour autant sortir le sextant. Un phare de 25 mètres de haut caché par 4 doigts donne un angle alpha d’environ 2°, on est situé environ à une distance de 720 mètres du phare. Un phare de 30 mètres relevé à 2° donne une distance d’éloignement de 860 mètres environ.
3)Petits trucs utiles
Les relèvements: quand on utilise le compas de relèvement il faut veiller à l’éloigner de tout appareil électronique(enceintes, relais…)ou câbles pouvant influer sur le magnétisme, et par la même occasion sur les infos du compas. Il faut avoir à l’esprit que plus la mer est agitée, plus le résultat de la mesure sera imprécis, de plus entre le temps de mesure et le temps de tracé sur la carte, le bateau continuera sa route, donc l’information retranscrite sur la carte ne sera pas en temps réel…Pour tracer un relèvement sur la carte on tient juste compte en général de la déclinaison(relèvement vrai=relèvement compas + déclinaison).
Pour avoir un point à trois relèvements le plus précis possible, on va prendre la mesure des trois amers dans un ordre bien précis. D’abord celui qui bouge le moins par rapport à la direction et la vitesse du bateau(l’amer le plus sur l’arrière), ensuite celui qui est le plus sur l’avant, et enfin celui le plus au travers. Le centre du cercle circonscrit au triangle obtenu indique notre position approximative.
Les alignements, ou recherche d’amers: si les amers recherchés sont situés entre le soleil et l’observateur(par beau temps), il est très difficile de les identifier. Si la carte nous indique un alignement de route à suivre et que l’on est pas sûr des amers aperçut, en les alignant et en les relevant au compas de relèvement on peut savoir si on s’est trompé ou pas en regardant la carte avec la règle cras. Pour avoir un alignement précis il faut que l’amer le plus proche de nous soit plus bas que l’autre, pour avoir un alignement bien visible.
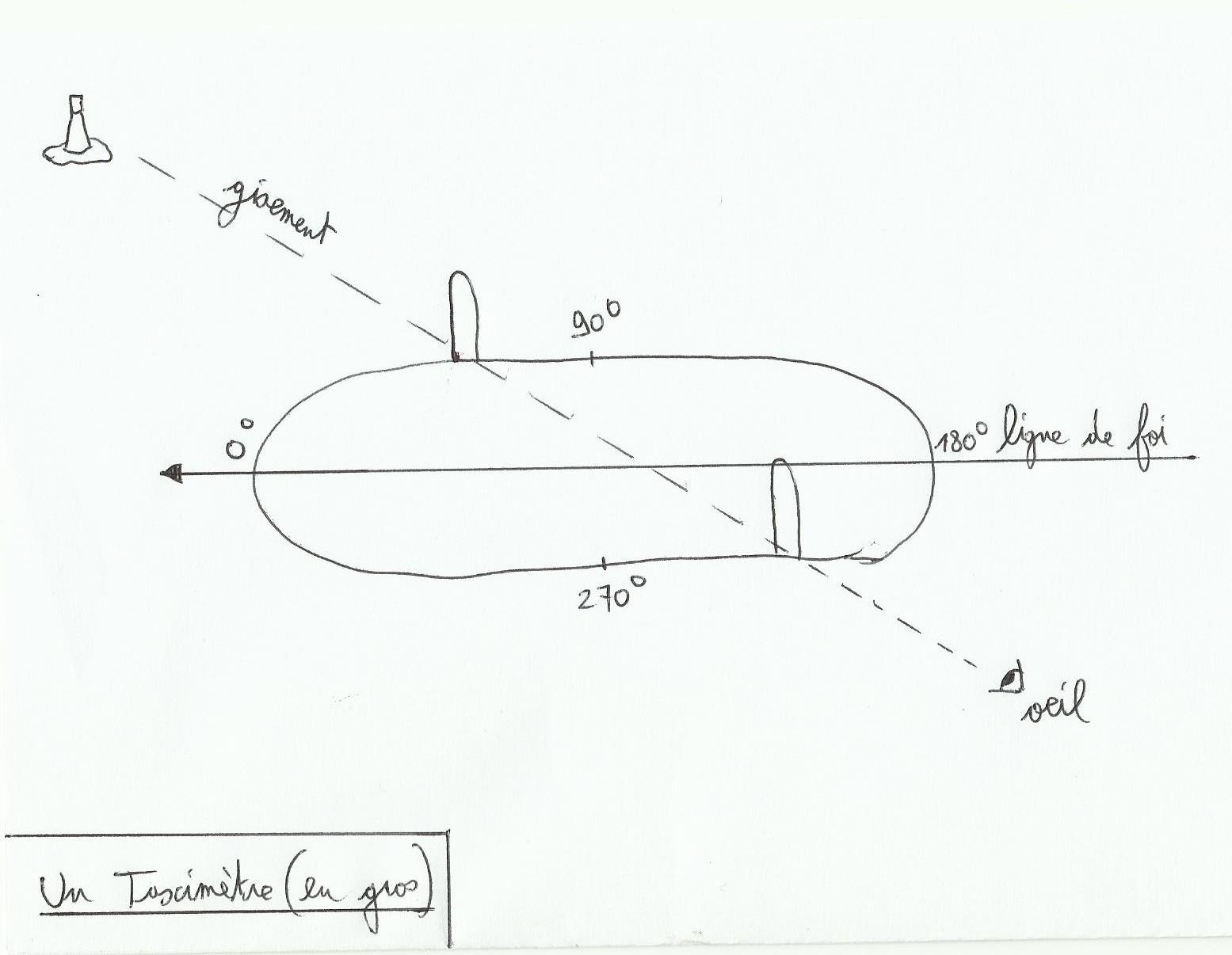
Les gisements: parfois quand on a la flemme d’utiliser le compas de relèvement, ou quand on l’a fait tomber à l’eau, on peut s’en passer avec cette méthode. Le gisement est l’angle que fait l’amer avec l’avant du bateau. En fait relèvement vrai= cap vrai + gisement. Pour trouver le gisement on peut mettre en place des repères autour du bateau, chacun donnant tel ou tel angle. On peut aussi installer un taximètre.
Le taximètre est un instrument qui se place au centre le plus élevé du bateau, son axe correspond à la ligne de fois du bateau et une alidade(comme sur un sextant)permet d’effectuer les mesures angulaires.
La marée influe sur la hauteur d’eau au cour de la journée, plus ou moins selon la zone de navigation. En général dans une journée on trouve deux marées hautes et deux marées basses, le temps entre deux marées étant d’environ six heures. La marée se décale environ d’une cinquantaine de minutes par jours(voir « la marée »)et évolue de façon sinusoîdale. La différence de hauteur d’eau entre une marée haute et une marée basse, que l’on appelle marnage change au cours du mois avec plus ou moins d’intensité(voir toujours « la marée »), ce changement est caractérisé par le coefficient de marée.
1)Le coefficient de marée
C’est le premier chiffre à noter avant de faire un calcul de marée, sans unité il évolue entre 20 et 120. Plus il est faible et plus il indique un faible marnage et donc de faibles courants; plus il est élevé et plus il nous informe sur un marnage fort, et donc des courants forts. Ce chiffre est indiqué dans le bloc marine ou l’almanach du marin breton, ou d’autres bouquins sur les marées à l’année. Il sert aussi pour calculer la force des courants. En dessous de coefficient 70 on est en morte-eau(marée plutôt faible)et au-dessus de 70 on est en vive-eau(plutôt fort).
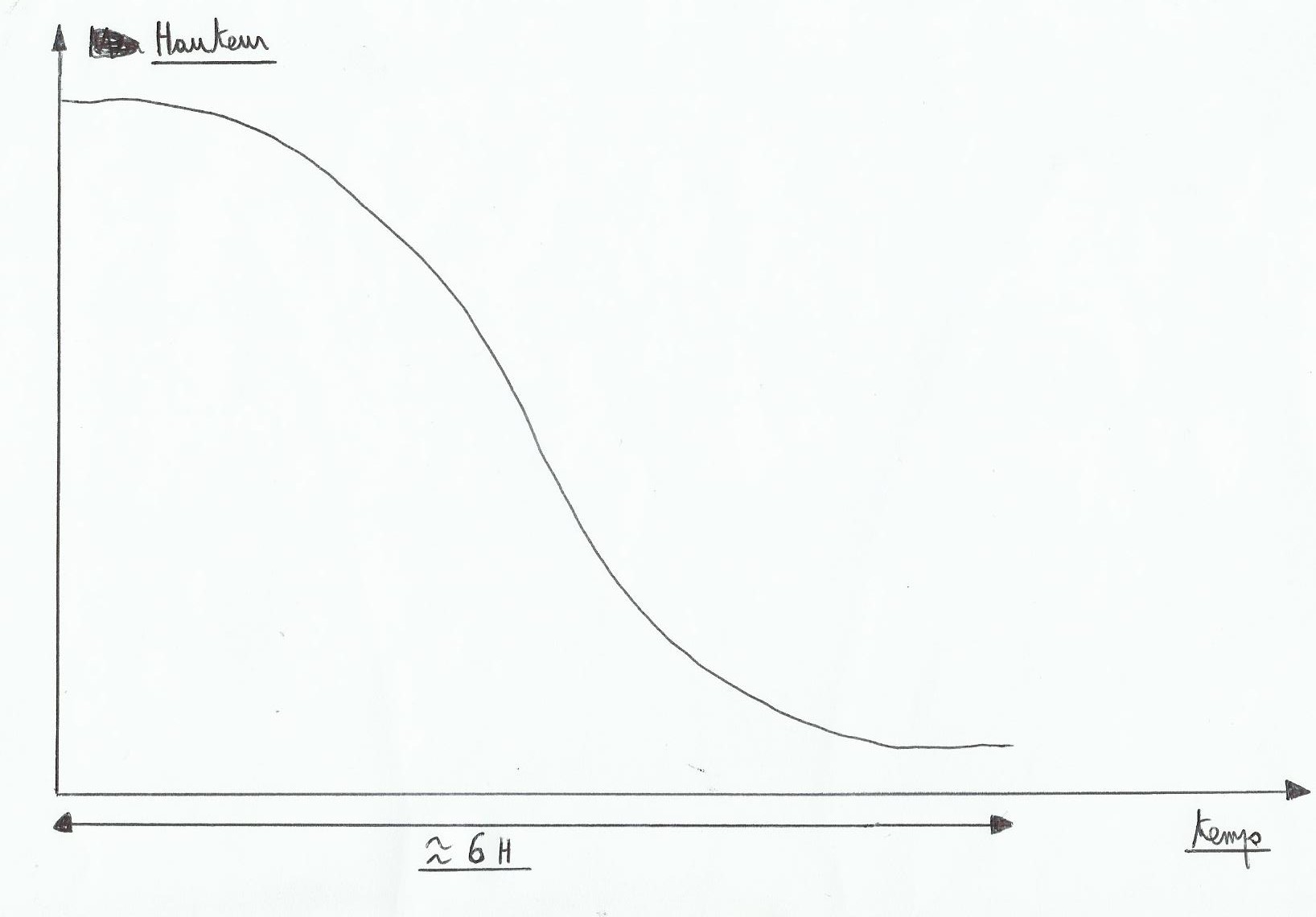
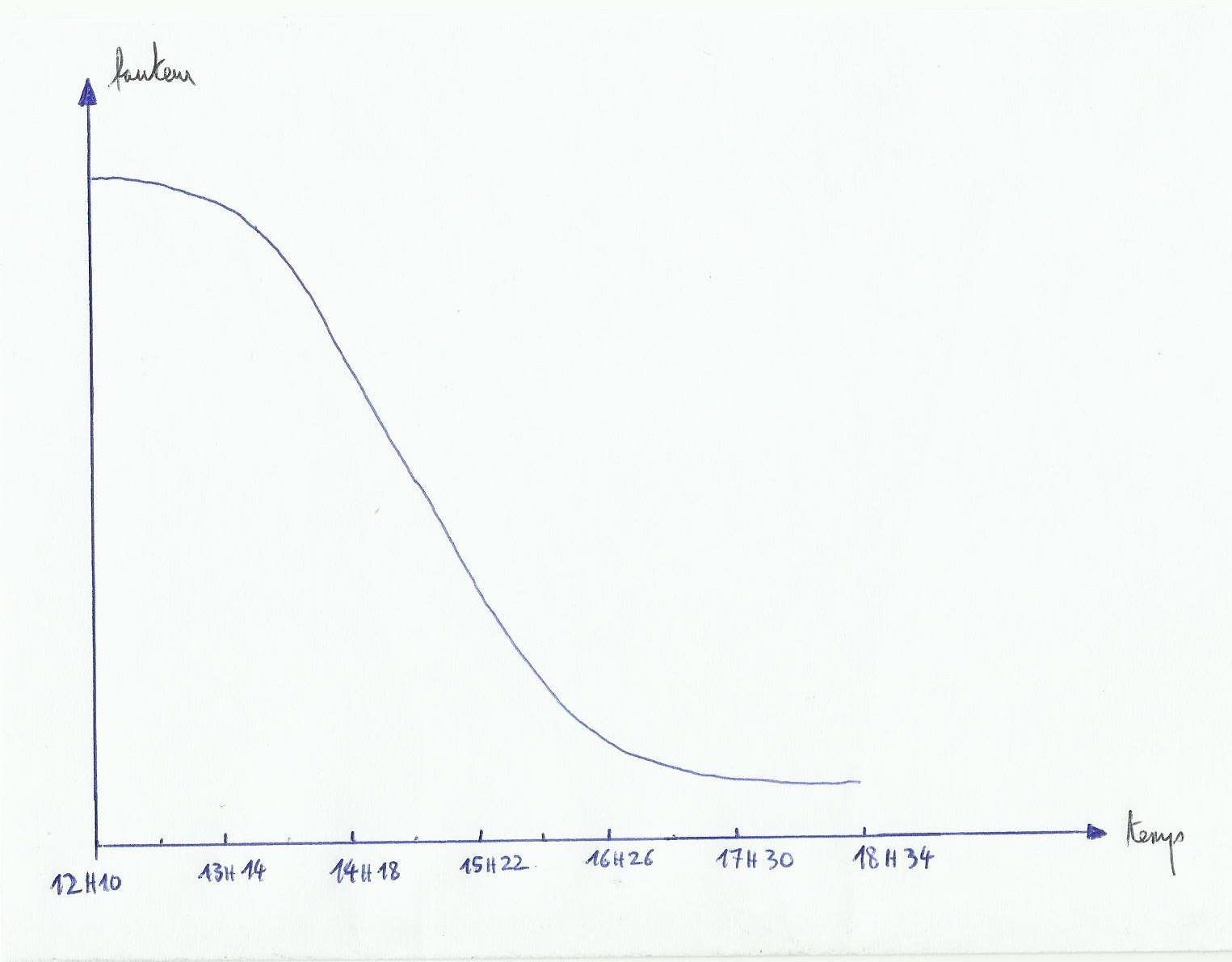
2)Evolution entre deux marées
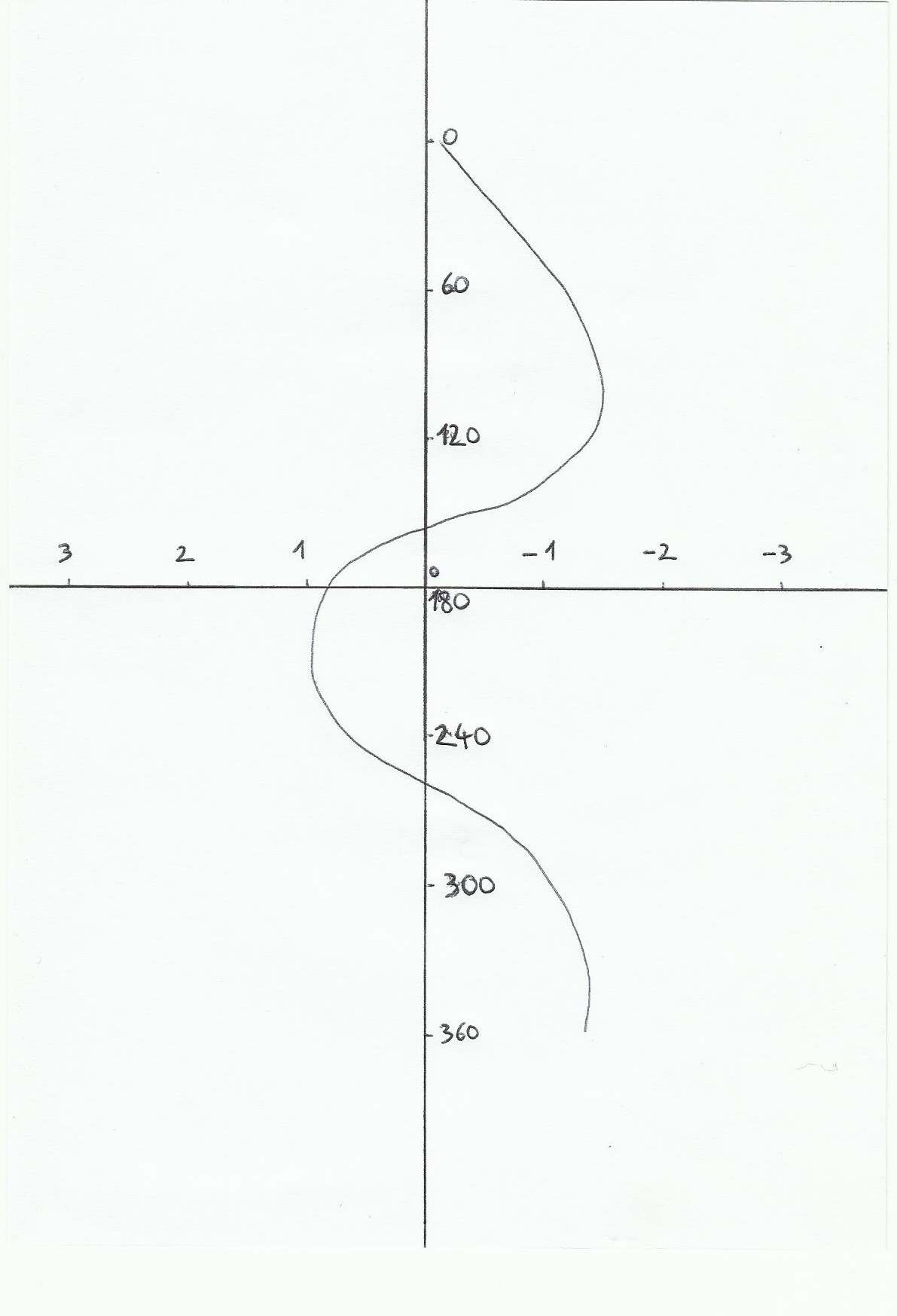
Comme on peut le voir, la marée n’évolue pas comme une droite linéaire. Elle décroît doucement au début, accélère rapidement au milieu et termine doucement en se stabilisant. On se rend donc compte que le moment où il y aura le plus de circulation d’eau, du coup là où il y aura le plus de courant se sera à mi-marée, soit trois heure avant ou trois heures après une basse ou haute mer environ. Les moments où il y aura le moins de courant se sera proche de l’étale(pendant la haute ou la basse mer). La méthode la plus simple pour savoir la hauteur d’eau dont on dispose à un moment et un endroit donné est de tracer un graphique, mais problème: comme on l’a vu, la marée n’évolue pas de façon linéaire, et tracer à main levée une sinusoidale c’est pas très précis!
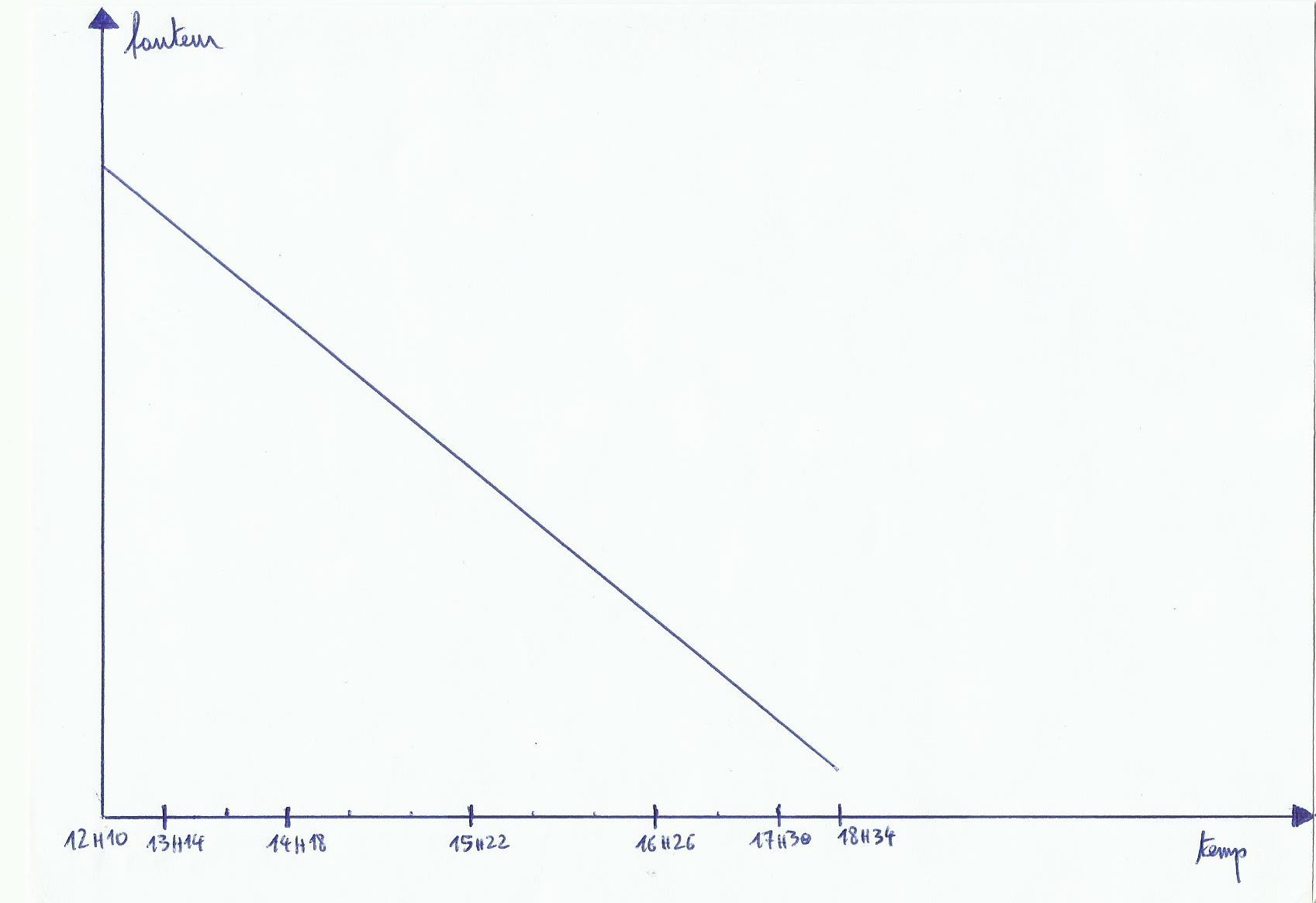
3)Changer une courbe sinusoidale en droite
Cette méthode nous fait perdre un peu de précision mais elle est simple. Comme on l’a vu plus haut le temps entre une basse et une haute(ou inversement)est d’environ 6 heures, c’est le temps marée et on le trouve simplement en calculant le temps écoulé entre les deux(exemple, 6 heures 24 minutes). Une heure marée, c’est le temps marée divisé par 6(donc ici 1 heure 4 minutes).
On admet l’évolution de la marée de la façon suivante; tout d’abord on divise le marnage par 12. La première heure marée, il va y avoir une augmentation ou une baisse de 1/12 ème du marnage, la deuxième heure marée 2/12 èmes, et la troisième heure marée 3/12 èmes(là où les courants seront plus forts). La quatrième heure encore 3/12 èmes, et après le rythme ralentit avec à la cinquième heure 2/12 èmes et pour finir à la sixième heure marée 1/12 ème. C’est la règle des douzièmes.
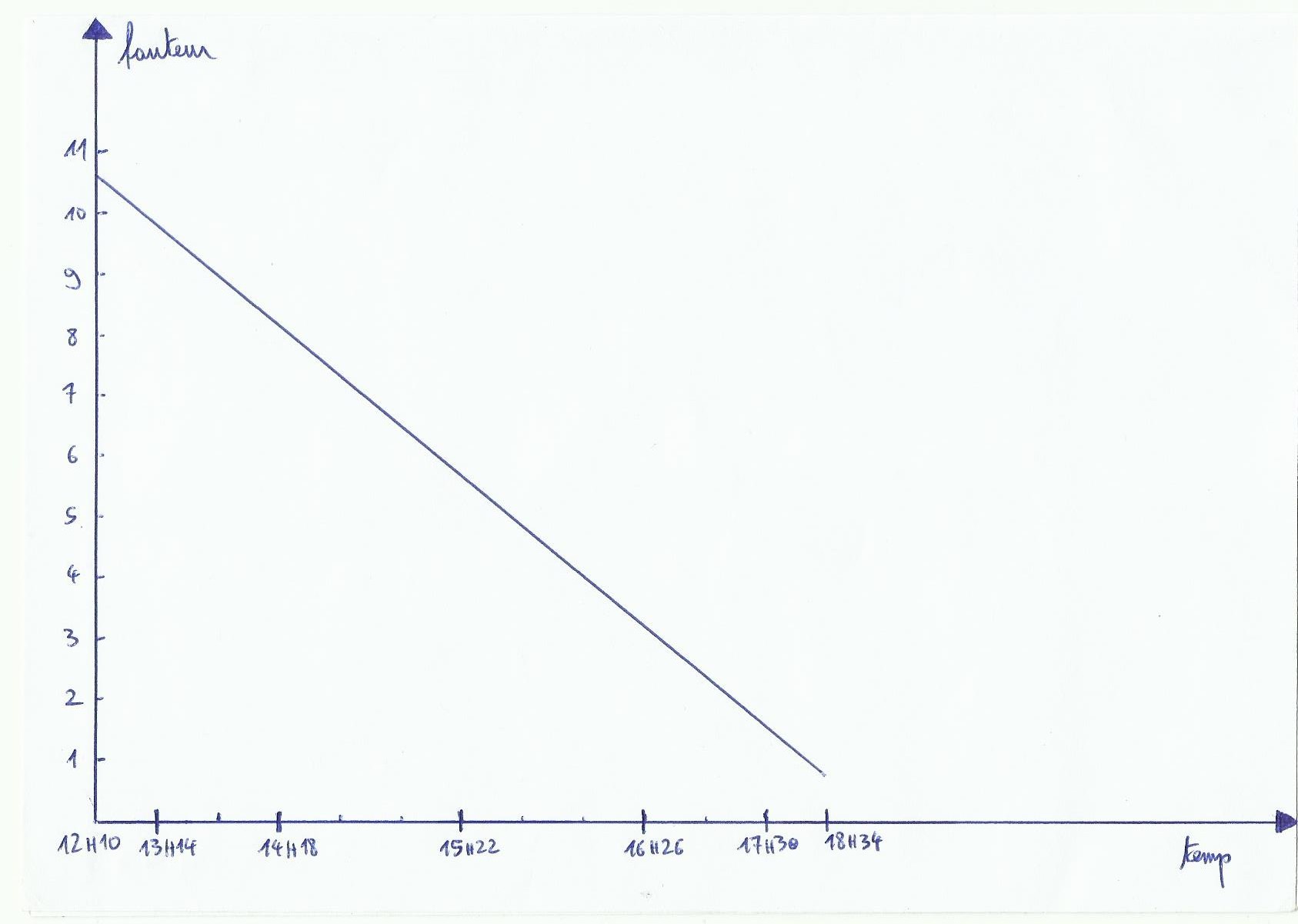
Sur ce graphique, les abscisses représentent les heures marées. Une heure marée faisant ici une heure et quatre minutes, à la fin si on ne s’est pas trompé on retrouve la bonne heure d’étale. C’est bien beau tout ça mais on est toujours embêté par la courbe! pour avoir une droite facile à tracer on va jouer sur ces abscisses en respectant la règle des douzièmes:
La deuxième heure prend deux fois plus d’unités que la première, la troisième heure marée trois fois plus que la première heure…On dispose d’un graphique qui nous donne instantanément la hauteur de marée dans une zone donnée.
Il suffit d’additionner cette hauteur de marée à la profondeur indiquée sur la carte pour savoir la profondeur rencontrée à cet instant. Sur les cartes les profondeurs écrites sont celles lorsque la mer est au plus bas(marée basse par coefficient 120). Sur les zones en vert(l’estran, les endroits couverts ou découverts par la marée)ou sur certains points de la carte on trouve des chiffres surlignés. pour connaître la profondeur à ces endroits on prend notre hauteur de marée et on soustrait le chiffre surligné. si le chiffre trouvé est négatif, il indique la hauteur à laquelle le relief émerge à cet endroit. Petit exemple:
Sur la carte on voit une profondeur de un mètre à l’entrée d’un chenal, le calcul de marée au-dessus concerne la zone où l’on navigue. Notre bateau a un tirant d’eau de deux mètres. On prend une marge de sécurité(pied de pilote)de un mètre. On veut savoir si à 15 heures 20 il y aura assez d’eau pour passer. D’après le graphique à 15 h 20 on a 5 mètre 70 de hauteur de marée, donc à l’entrée du chenal on va avoir en réalité 6 mètres 70 de profondeur à 15 h 20. Sous la quille à ce niveau il y aura 4 mètres 70 d’eau, bien au-dessus des 1 mètres de pied de pilote, du coup c’est cool on peut passer sans surprise désagréable.
4)Les corrections
Dans les almanach de marée il y a des ports de référence, par exemple si on veut connaitre l’évolution de la hauteur d’eau à Brest, il suffit de prendre pour tracer notre droite directement les horaires de Brest. Par contre si on veut savoir les données pour Loctudy, il faut tout d’abord prendre les horaires et les hauteurs d’eau de sont port de référence qui est Port-Tudy. Les corrections de hauteur et de temps changent selon le fait que l’on soie en vive-eau ou en morte-eau; pour être le plus précis possible le mieux est de prendre les corrections de morte-eau quand le coefficient de marée est entre 20 et 45, et celles de vive-eau quand le coefficient se situe entre 95 et 120. Entre 45 et 95, on fait une moyenne des corrections.
Il faut toujours vérifier l’heure de référence des données, si toutes les données sont en UT+1, il faut penser à rajouter une heure en été(en général fin Mars à fin Octobre).
5)Autres paramètres
La pression atmosphérique influe sur la hauteur d’eau également. On considère la pression atmosphérique moyenne à la surface de la mer à 1013 hpa, pour chaque hpa supérieur à cette moyenne on retranche 1 cm(l’atmosphère appuie l’eau), et pour chaque hpa en moins on ajoute 1 cm.
Le vent modifie aussi le niveau moyen par son action. Un vent d’afflux(vient du large)va augmenter le niveau moyen(pour un vent fort grosso modo 50 cm)et un vent de reflux(vent de terre)va avoir tendance à baisser ce niveau(50 cm en moins par vent fort). Il est cependant difficile de quantifier précisément la modification de hauteur selon l’intensité du vent. Ce phénomène explique en partie pourquoi par fort coup de vent du large pendant une marée haute à fort coefficient, il y a des débordements dans certains ports.
Le vent peut aussi modifier la durée du flux et du reflux, l’heure de mi-marée reste fixe. Par exemple un vent de reflux diminue la durée du flux et évidemment augmente celle du reflux, et inversement.
Les zones de navigation près d’une sortie de cour d’eau subissent aussi des modifications des horaires de marée quand il y a eu beaucoup de précipitations auparavant, du coup la marée montante peu prendre du retard.
6)Le pied de pilote
Le mieux je pense est de prendre 1 mètre pour être tranquille. Cependant quand la mer est agitée avec des hauteurs de vagues importantes, il faut l’augmenter selon la hauteur des vagues. Par exemple si on a des vagues de deux mètres, on augmente le pied de pilote de deux mètres.
Tout les corps célestes qui interagissent entre eux par l’intermédiaire de la force d’attraction gravitationnelle(voir lois de Newton)créent des forces de marées, la Lune exerce sur la Terre une force de marée mais l’inverse est aussi vrai, même plus conséquent puisque cette force a rendu la période de rotation de la Lune égale à sa période de révolution(28 jours environ, du coup c’est toujours la même face de la Lune qui est visible). L’attraction de la Terre a finit par « freiner » la rotation de la Lune en quelques sortes, il est donc assez facile d’imaginer à l’avenir la force d’attraction de la Lune freiner aussi la rotation de la Terre, rallongeant petit à petit la durée du jour(la Terre prend 1 seconde de retard tout les 600 siècles).
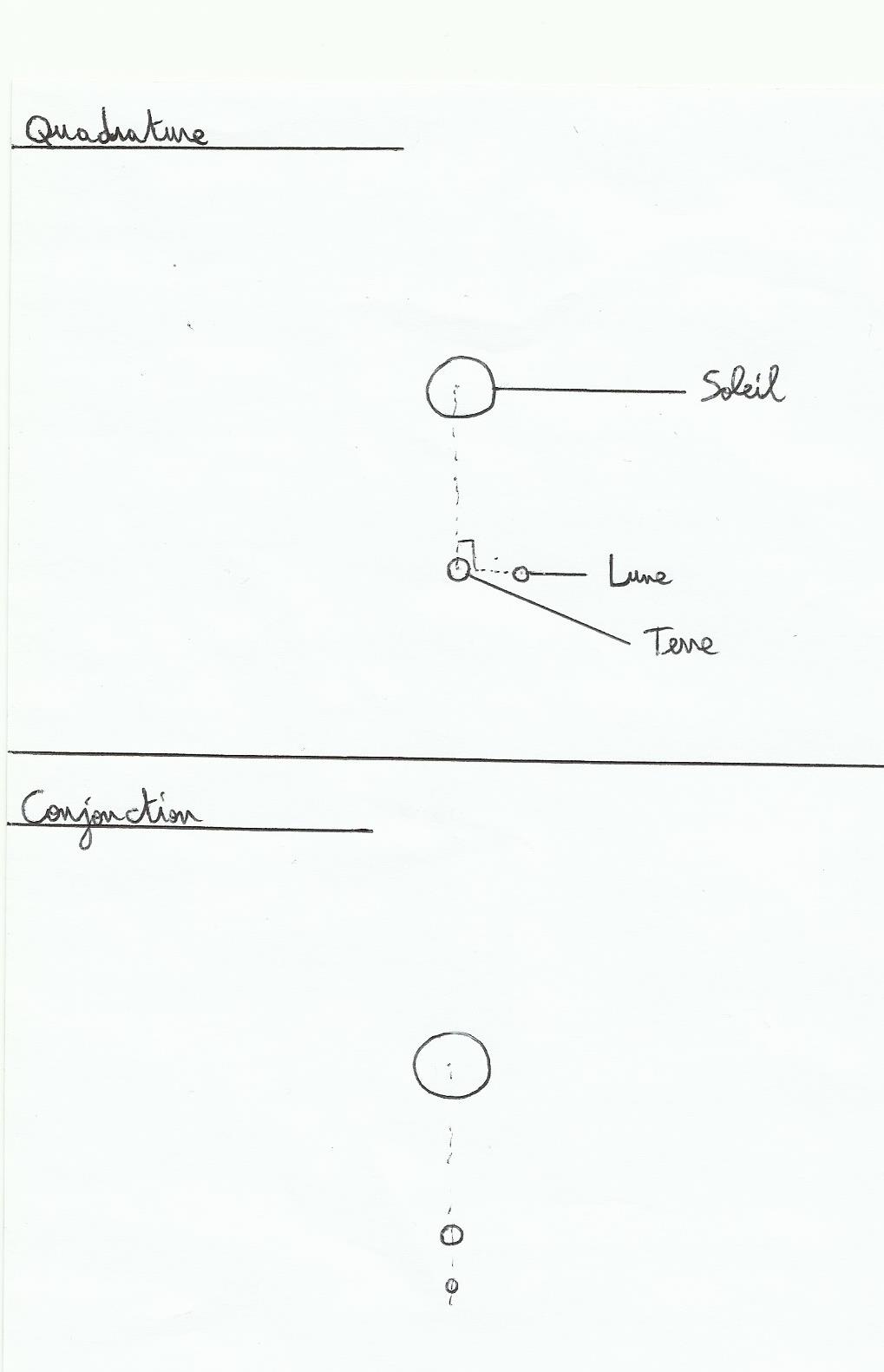
1)Quadrature et Syzygie
Les astres qui ont une influence gravitationnelle significative sur la Terre sont le Soleil et la Lune, donc les deux entrent en jeu dans le phénomène des marées. Le Soleil représente un tiers de la force de marée totale et la Lune les deux tiers restants. Leur effet s’additionne quand ils sont alignés avec la Terre(conjonction ou Syzygie)et se perturbe quand ils sont en quadrature(forment un angle de 90° avec la Terre).
En gros quand il y a conjonction, lors de la nouvelle lune ou la pleine lune les marées sont fortes, et quand on est en quadrature(premier ou dernier quartier)les marées sont plus faibles.
Le soleil ayant un zénith évoluant dans la zone équatoriale, et la Lune ayant une orbite proche de l’écliptique(5° de l’écliptique), on en déduit que cette force s’applique essentiellement sur les masses d’eau équatoriales. Au large le déplacement d’eau est faible mais il devient important à la côte avec une profondeur moindre.
Remarque: les grandes marées d’équinoxe sont principalement dues au Soleil car à cette période il exerce sur les masses d’eau équatoriales sa force maximum.
La Terre tournant sur elle-même en 24 heures, il y a donc environ deux marées hautes et basses en un point du globe le même jour. La Lune met 28 jours pour tourner autour de la Terre dans le sens anti-horaire(comme la Terre)donc en un point du globe l’origine de la marée se décale de 1/28 ème de jour, 52 minutes environ(entre deux marées basses par exemple on aura environ 12 heures 26 minutes de temps).
2)Effets
Les effets occasionnées par ce phénomène se ressentent près de la côte. Plus les eau sont faibles en profondeur, plus la hauteur d’eau va changer, plus l’on est proche de la zone équatoriale et plus son influence se sent, plus la côte se resserre, plus il va modifier les changements de hauteur d’eau. Le phénomène de marée est presque inexistant dans les mers fermées car les masses d’eau présentes sont moindres.
Exemples: la marée très faible en Méditerranée, au contraire très forte en Manche à cause de la faible profondeur de cette dernière(70 mètres au max environ)par rapport à l’Atlantique, à la forme en entonnoir de la Manche et angulaire de la côte entre la Bretagne et le cap de la Hague qui « emprisonne » l’eau, et enfin à l’influence de la force de Coriolis.
Si si, c’est censé être la Manche…Comme pour le vent, les courants sont déviés vers la droite dans l’hémisphère Nord, le marnage est la différence de hauteur d’eau entre la marée haute et la marée basse.
Comme pratiquement tout les corps célestes la terre développe un champ magnétique grâce à sa rotation sur elle-même. Ce champ dépend de la quantité de fer présente dans le noyau, des masses de fer présentes à la surface et de la vitesse de rotation(les étoiles à neutrons, les pulsars ont un champ magnétique très fort car leur vitesse de rotation est très importante). Ce champ magnétique se matérialise avec la présence de la magnétosphère, c’est une ligne de champ évoluant autour de la terre et qui la protège des particules du soleil.
La magnétosphère s’auto-entretient par effet dynamo:
.Le champ magnétique terrestre joue le rôle de l’aimant, de l’inducteur(équivalent de l’électroaimant dans un alternateur de voiture).
.Les masses de fer liquide en rotation dans le noyau jouent le rôle de la bobine de cuivre conductrice, donc de l’induit(correspond au stator d’un alternateur de voiture).
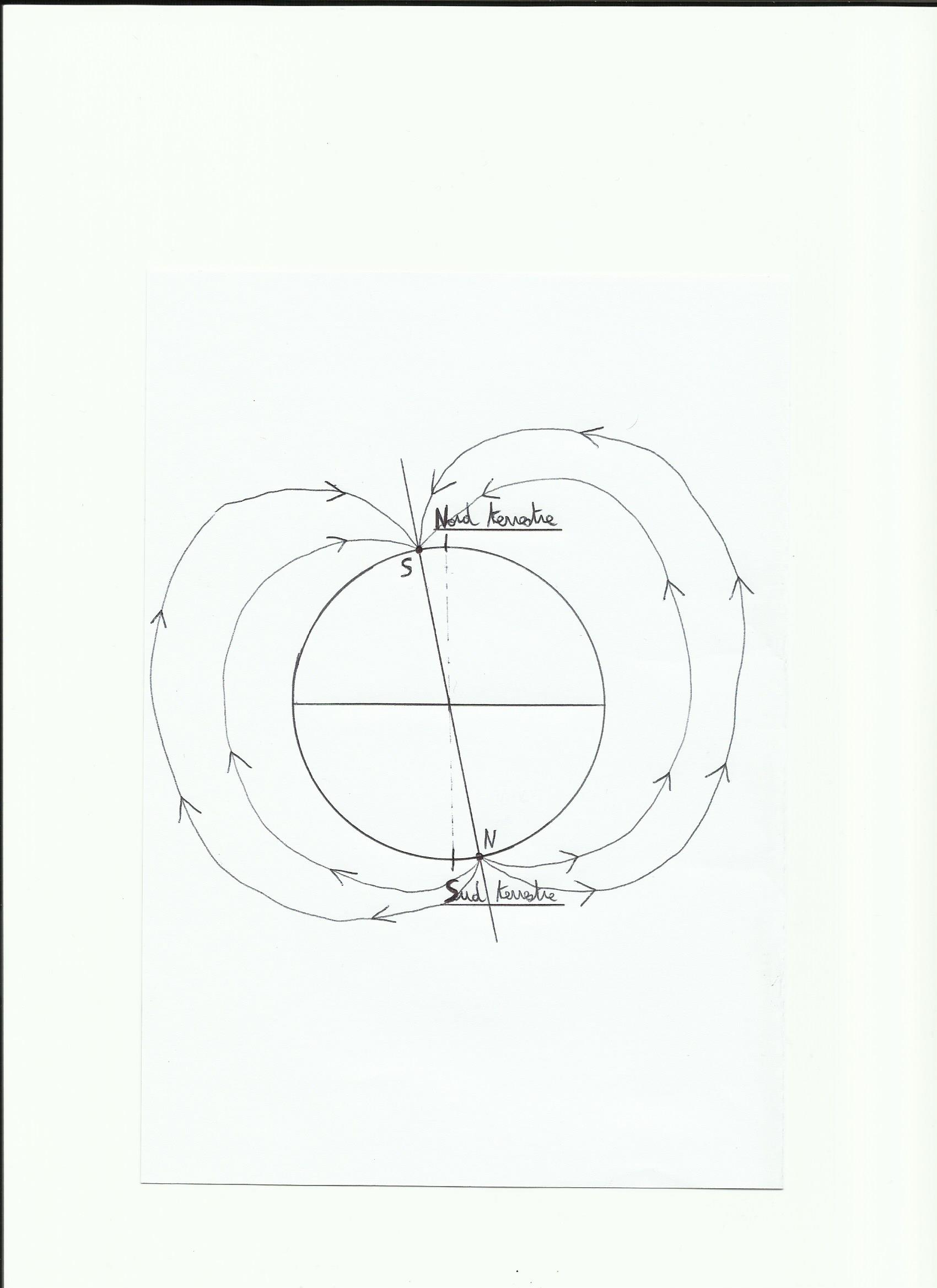
Ce champ magnétique terrestre s’organise comme un aimant dipolaire classique avec un pôle Nord et Sud, les lignes de champ sortent par le pôle Nord et entrent par le pôle Sud; donc en fait actuellement ce qui est montré comme le pôle Nord par la boussole est en fait le pôle Sud magnétique.
1)Le champ magnétique terrestre
Fait important pour les navigateurs, la ligne des pôles magnétiques est décalée par rapport à la ligne des pôles géographiques de 8° environ actuellement.
Le Nord magnétique est situé environ à 82°N de latitude et 11°O de longitude(correspond au Nord des côtes canadiennes). Le Sud magnétique est à 65°S de latitude et 138°E de longitude grosso modo.
Cette ligne des pôles magnétiques est variable dans le temps, et peut parcourir le globe pour s’inverser sur une certaine période(il peut y avoir jusqu’à 5 inversions de pôles en 1 million d’années, une inversion dure à peu près 15000 ans).
2)Effets notables
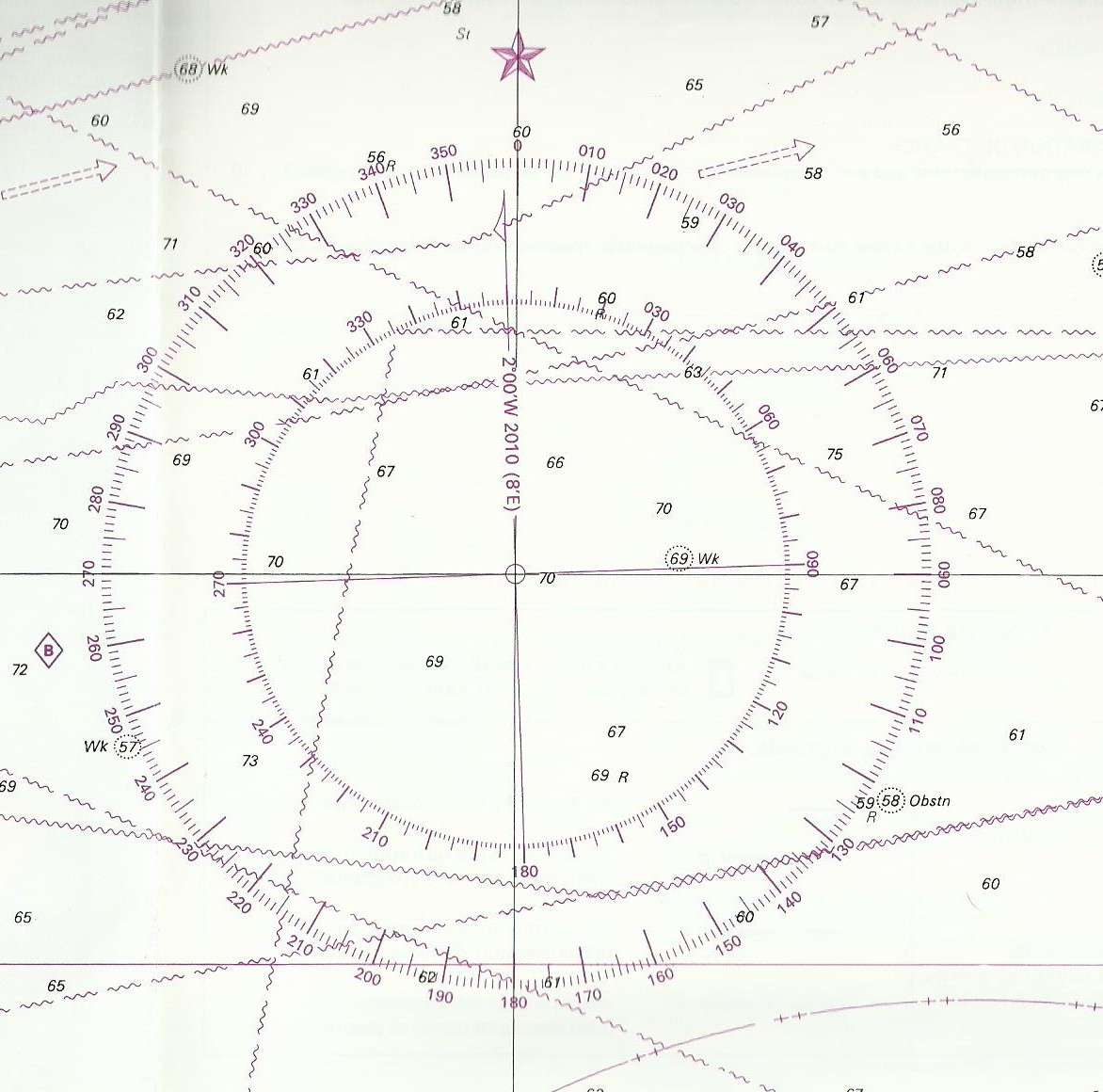
Sur les cartes de navigation on rencontre ce genre de truc:
Cet outil matérialise simplement la différence entre le Nord vrai qui correspond au Nord géographique ou encore le Nord terrestre(là où se coupent les méridiens), et le Nord magnétique. Au centre du cercle on peut voir une inscription verticale: « 2°00W 2010(8’E) ». Cela veut dire qu’en 2010 le Nord magnétique était(dans la zone de la carte)à 2°W du Nord vrai. « 8’E » signifie que tout les ans le Nord magnétique se déplace à l’Est de 8 minutes, donc tout les ans le Nord magnétique se rapproche du Nord vrai. Donc en 2014, sachant que 1°=60 minutes, cette différence sera de 8*4=32′ soit environ 1/2 degré de différence par rapport à 2010. En 2014 la différence Nord vrai/Nord magnétique sera donc de 1°28’W. Cette différence c’est la Déclinaison.
Cependant, sinon ce serait trop simple, il faut ajouter un autre paramètre, celui des interférences magnétiques possibles rencontrées sur un bateau. La présence de métaux ou de circuits électriques à proximité du compas de route ou de relèvement peut influer sur lui. En effet le Nord magnétique n’est pas toujours équivalent au Nord compas(celui lut sur l’instrument). Cette différence s’appelle la déviation. Sur un bateau on la matérialise grâce à une courbe de déviation qui indique les différences entre les cap magnétiques que l’on devrait trouver et les cap compas lut. On peut faire cette courbe au port en tournant le bateau dans tout les sens et en notant les différences avec un autre compas à terre, ou alors en s’aidant d’un gps en navigation, ou encore en utilisant des alignements de route.
Finalement, entre le cap vrai(celui fait par le bateau)et le cap compas indiqué par l’instrument, il faut tenir compte de la Déclinaison et de la déviation. On peut regrouper les deux valeurs sous la variation W. W(variation)=D(Déclinaison)+d(déviation)
Le cap vrai tracé sur la carte est le cap compas auquel on ajoute la variation. Au contraire, en partant de la carte, pour donner un bon cap au barreur on enlève cette variation. Cv(cap vrai)=Cc(cap compas)+ W.
La Déclinaison comme la déviation est négative quand elle est Ouest et positive quand elles est Est.
Le champ magnétique est aussi à l’origine des aurores boréales aux pôles(les particules du vent solaire agissent avec les atomes de l’atmosphère, créant des phénomènes lumineux)et des orages magnétiques(brusques variations du champ magnétique terrestre pendant les tempêtes solaires).
Remarque: la déviation est très importante pour les bateaux en métal. En général pour de la navigation côtière elle peut être négligeable, cependant pour du hauturier elle est indispensable pour l’estime tout comme la Déclinaison.



















{kind=link}